Autori novog rada pretpostavili su da se modeli najbolje treniraju pomoću predviđanja
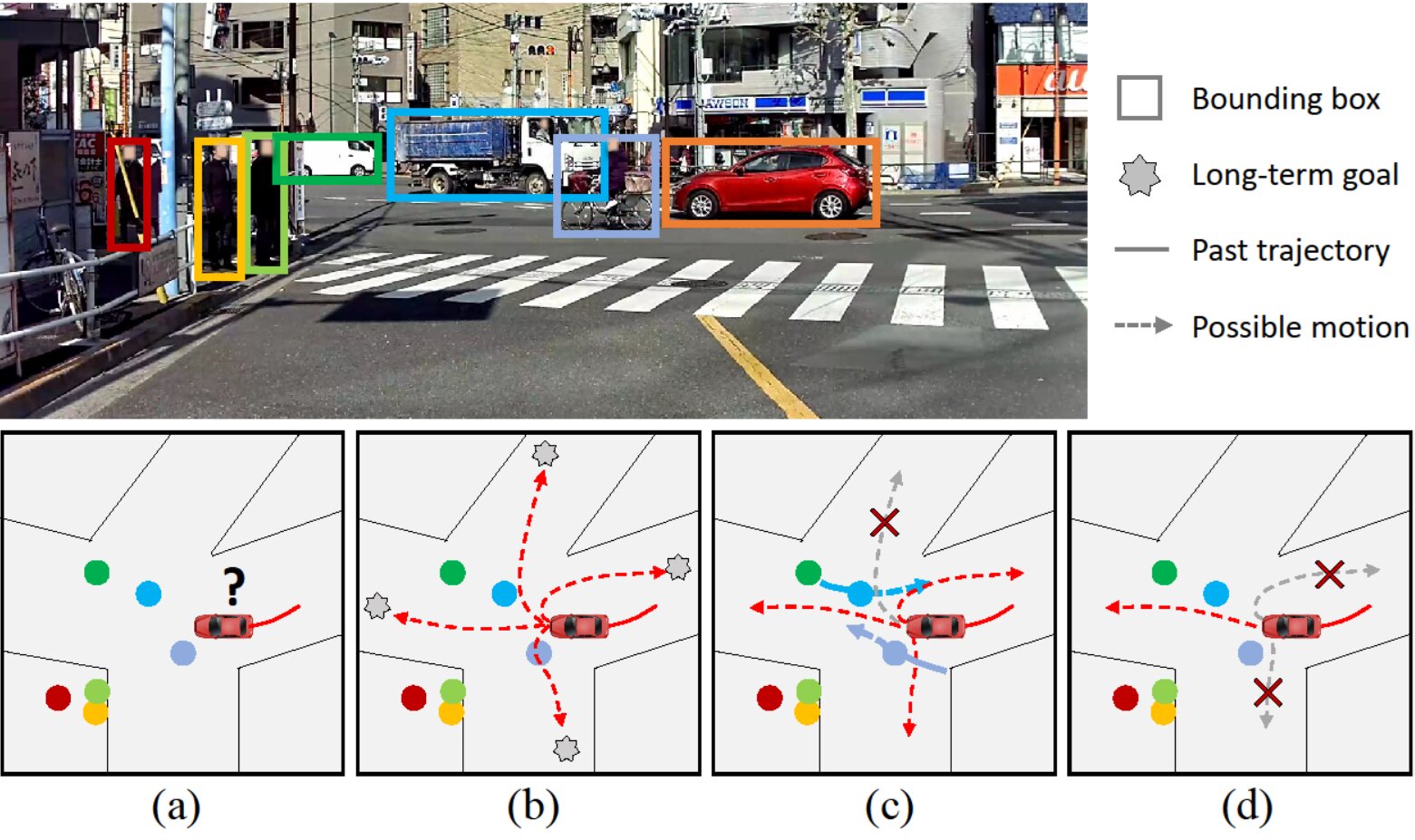
Istraživači planiraju razviti arhitekturu koja uzima u obzir i kratkoročne i dugoročne ciljeve — to su glavne komponente kada se procjenjuju namjere pješaka ili automobila.
Na primjer, postoji automobil koji se nalazi na raskrižjuželi skrenuti lijevo. Važno je uzeti u obzir ne samo dinamiku prijevoza, već i to kako se namjera može promijeniti ovisno o različitim čimbenicima: zbog vlastite želje, drugih sudionika u prometu ili prepreka.
Zatim, algoritam prvo kodira prošla iskustva na kojima je model obučen da predvidi koje bi mogle biti dugoročne i kratkoročne posljedice.
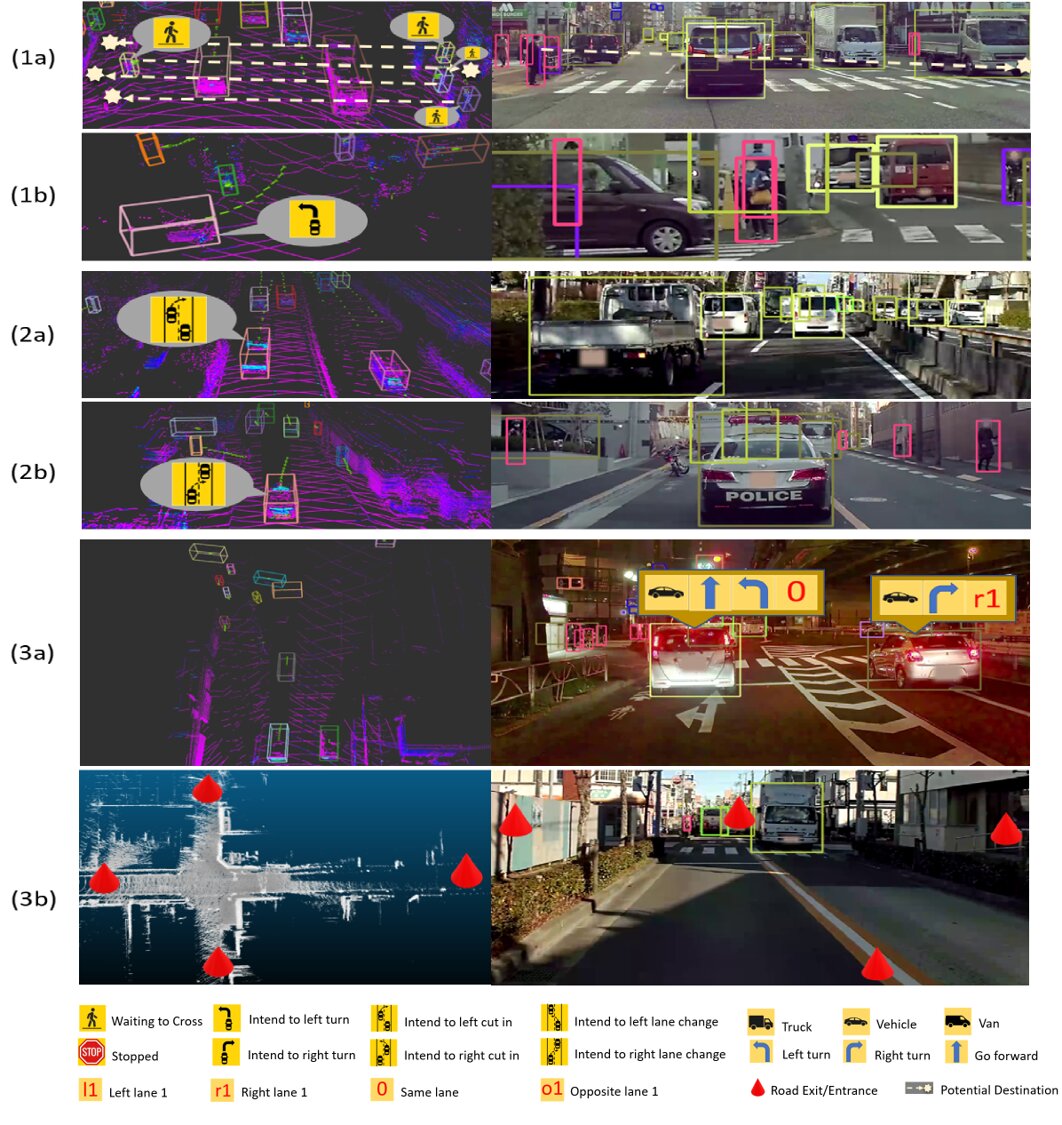
Model dodjeljuje svim okolnim objektimaznakovi su "namjere" koje se mogu mijenjati tijekom puta, "okruženje" kao što su prometni znakovi i drveće koje utječu na namjere agenata i "kontekstualni znakovi" kao što su vrijeme i uvjeti na cesti.
Istraživači su evaluirali svoj model u nizu testova i otkrili da je nadmašio druge najsuvremenije metode predviđanja putanje za 27%.
Programeri vjeruju da model može bitikoristi se za poboljšanje sigurnosti i performansi autonomnih vozila. Osim toga, druge istraživačke skupine mogu koristiti skup podataka LOKI za pripremu vlastitih modela za predviđanje puteva pješaka i vozila na cesti.
Čitati Unaprijediti:
Novi iOS 15: datum izlaska, iPhone dizajn i značajke. Ispričamo sve što se zna
Izrazito tanak materijal napravljen je od bijelog grafena. Zamijenit će poslužitelje
Pogledajte teški jurišni dron koji nosi tonu oružja