Facebook će koristiti računalni vid i sustave za obradu prirodnog jezika koji su već
Planirano je da robot bude potpuno autonoman.i samoučenje - sustavi moraju učiti izravno iz sirovih podataka. To će omogućiti da se uređaj brže prilagodi novim izazovima i promjenama okolnosti, vjeruje tvrtka. Osnova umjetne inteligencije bit će učenje temeljeno na RL modelu, što će robotima omogućiti samostalno učenje pomoću pokušaja i pogrešaka.
Želimo naučiti robota da hoda bez pomoći. Pokret je u robotici vrlo težak zadatak, a to je s naše točke gledišta vrlo uzbudljivo.
Razvojni istraživač Facebooka Roberto Calandra
Značajka robota s Facebookaje da uređaj neće biti implementiran algoritmi za njegovo kretanje. U početku ne može hodati, međutim, postupno koristeći algoritam učenja, on počinje interakciju sa svojim kontrolerima, koji se već mogu aktivirati za kretanje. Što više robota dobije, to bolje funkcionira.

U ovom slučaju, robot ne samo da moraodredite svoj položaj i orijentaciju u prostoru, ali i zadržite ravnotežu i međusobno povežite impulse senzora za ispravan rad složenih mehanizama, kao što je koljeno.
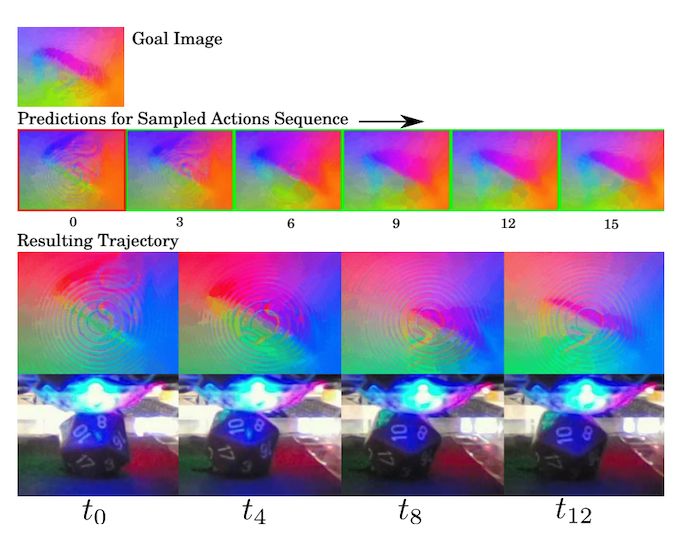
Roboti iz Facebooka za računalni vidkoristite jedan od algoritama koji su razvijeni za predviđanje popularnosti videozapisa. Neuronska mreža može analizirati nekoliko sekundi videa i predvidjeti daljnje okvire čak i bez gledanja kako bi se ubrzala analiza ogromne količine materijala.
Kao dio eksperimenta Facebook Researchpredstavio prvi uređaj - manipulator koji može raditi s joystickom, kotrljati kocku s 20 faseta i ispravno razumjeti rezultate koji su pali u sekundi ili drugom.
Kombiniranje vizualnih i taktilnih izvora informacija može poboljšati metode učenja i funkcionalnosti budućih platformi za samostalno učenje, navodi Facebook.
Prema programerima, sada sličnoprojekti koriste samo jednu vrstu (maksimalno dvije) informacija, dok robotski uređaji za puni rad moraju percipirati informacije različitim osjetilima.