Istraživači sa Sveučilišta Illinois na Sveučilištu Urbana-Champaign i Sveučilištu Princeton koristili su
Znanstvenici su koristili malenu spiraluaktuatori koji oponašaju rad mišića u prsnom košu klipana. Umjetni pokretač povlači sićušnu gredu, uzrokujući da se robot polako savija i pohranjuje elastičnu energiju. Nakon što se oslobodi, ova energija gura robota prema gore.
U prethodnim studijama znanstvenici su to otkriliklipnjača ima poseban spiralni mišić. Pohranjuje energiju i aktivira se, na primjer, kada se kukac prevrne na leđa. Pod djelovanjem oštrog ispravljanja ovog mišića, tijelo kornjaša se izbacuje u veliku visinu, nekoliko puta veću od svoje veličine. Isti mehanizam radi za robote.
Jedan od glavnih izazova male robotike je pronaći dizajn koji je malen, ali dovoljno snažan da svlada prepreke ili brzo napusti opasna mjesta.
Sameh Tawfiq, voditelj istraživanja
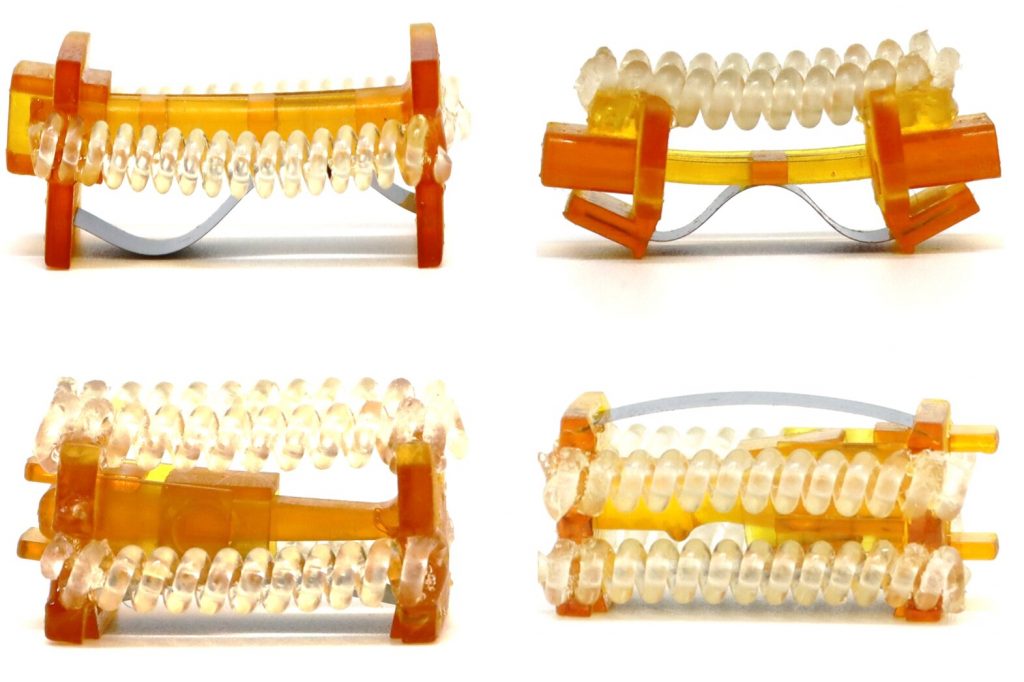 Varijante dizajna robota za skakanje koje su predložili istraživači. Slika: Sveučilište Illinois Urbana-Champaign
Varijante dizajna robota za skakanje koje su predložili istraživači. Slika: Sveučilište Illinois Urbana-Champaign
Znanstvenici vjeruju da će sićušni robotiza odlazak na teško dostupna mjesta za pomoć u održavanju velikih strojeva kao što su turbine i mlazni motori, ili u poljoprivredi za pregled postrojenja, kao što je snimanje slika radi utvrđivanja problema.
Čitaj više:
Ogromna sunčeva pjega okreće se prema Zemlji. Vidljivo je golim okom
Pogledajte kako leti avion bez lopatica. Njegova brzina prelazi 900 km/h
Mliječni put je nenormalno velik za svoju galaktičku nit
Na naslovnici: likovna ilustracija ideje. Slika: Michael Vincent, Sveučilište Illinois Urbana-Champaign