Metoda učenja koju su predložili robotičari omogućuje robotu da samostalno nauči izvoditi plivačke manevre.
“U našoj studiji predstavili smobiološka potkrepljena metoda kontrole učenja za simulaciju kretanja podvodnih robota,” rekao je Gang Chen, jedan od autora razvoja. “Ova se metoda temelji na jednom od naših prethodnih radova o kretanju dabra, objavljenom u Springer Linkovom časopisu Journal of Intelligent & Robotski sustavi".
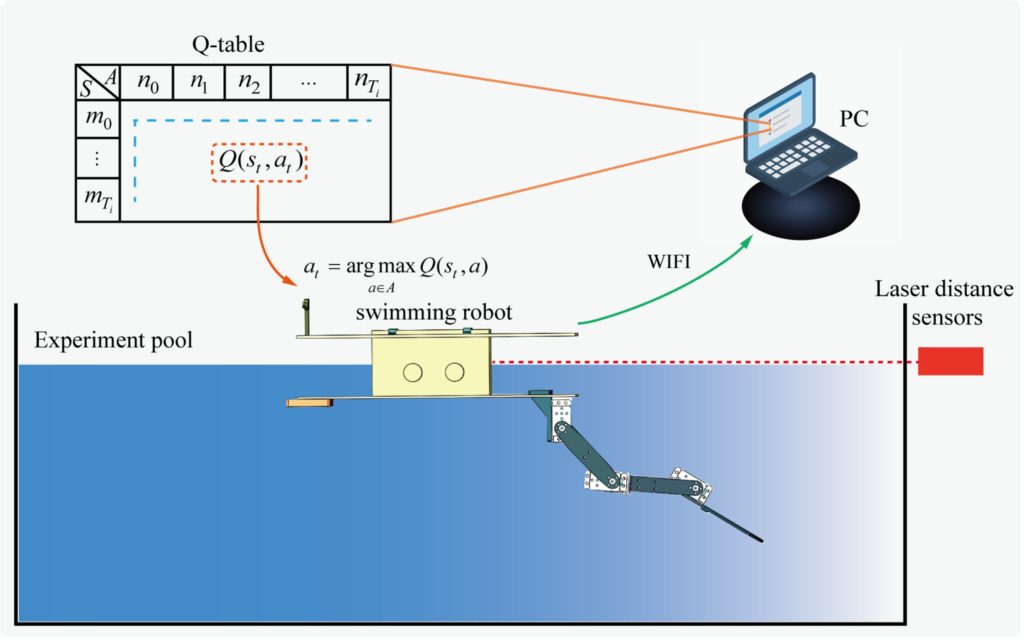 Princip treninga robota dabra
Princip treninga robota dabra
Podvodni roboti poput onog kojeg su stvorili Chen i njegovikolege su nelinearni sustavi, a njihova kretanja uključuju složenu hidrodinamiku. Stoga, točno modeliranje njihova kretanja može biti vrlo složen zadatak koji zahtijeva značajne računske resurse.
Za razliku od drugih modela upravljanja podmornicamaRobotski pristup koji su razvili Chen i suradnici ne zahtijeva integraciju složenih modela kretanja temeljenih na dinamici fluida. To je zbog činjenice da se temelji na pojednostavljenju ideja o radu zglobova odgovornih za plivanje u dabrova. To olakšava treniranje modela i također smanjuje neučinkovite pokrete robota tijekom treninga.
“Kombiniranjem učenja s pojačanjem samehanizama koji su u osnovi plivačkog ponašanja dabrova, naša metoda implementira robotsku kontrolu nad plivanjem što je brže i učinkovitije moguće”, objasnio je Chen. "Najznačajnija prednost je ta što izbjegava stvaranje složenih modela kontrole pokreta i brzo implementira kontrolu plivanja robota s jednom nogom nalik dabru."
Čitaj više
Američki satelit "ugledao" je neobičnu poruku sa Zemlje
Objavljen video s rakete koja je lansirana iz eksperimentalnog akceleratora
Čudovište u središtu naše galaksije: pogledajte fotografiju crne rupe u Mliječnom putu