Naziv Dyret (norveški za "životinju") je akronim za Dynamic Robot for Embodied Testing.
“Pokazali smo prednosti postojanjarobot može stalno prilagođavati svoj oblik tijela. Naš robot dokazuje da se to lako može učiniti modernom tehnologijom ”, objašnjava Tonnes Nygaard, viši predavač na Odsjeku za informatiku UiO-a.
U Dairetovom slučaju preoblikovanje tijela znači da on regulira duljinu nogu. Mehanizam prilagodbe oblika tijela pokazao se vrlo korisnim za robota.
Znanstvenici su ranije pokazali da se njihov robot prilagođavau razna okruženja pod kontroliranim unutarnjim uvjetima. Nygaard je potom šest mjeseci proveo s kolegama inženjerima u Commonwealth Scientific and Industrial Research Organisation (CSIRO) u Australiji. Specijalizirala se za vanjsko testiranje robota koji se samostalno uči.
“Prije se mislilo da je to preteškodosegnuti u stvarnom svijetu. Uz pomoć robota i naših eksperimenata pokazali smo da je to moguće”, objašnjava Nygaard u intervjuu za Titan.uio.no. Rezultati rada objavljeni su u časopisuInteligencija stroja prirode.
Promjenom duljine nogu, robot možeautomatski mijenjaju oblik tijela. Morfološki prilagodljivi roboti mogu raditi u nepredvidljivim okruženjima i suočavati se s novim izazovima, a da ne moraju preoblikovati svoju strukturu ili obnavljati svaki put kad naiđu na nešto neočekivano.
Ljudima je teško zamisliti koliko je robotu teško premjestiti, na primjer, s betona na travu. Ne zaboravite da osoba ima dugogodišnje iskustvo i poprilično osjećaja u odnosu na robota.
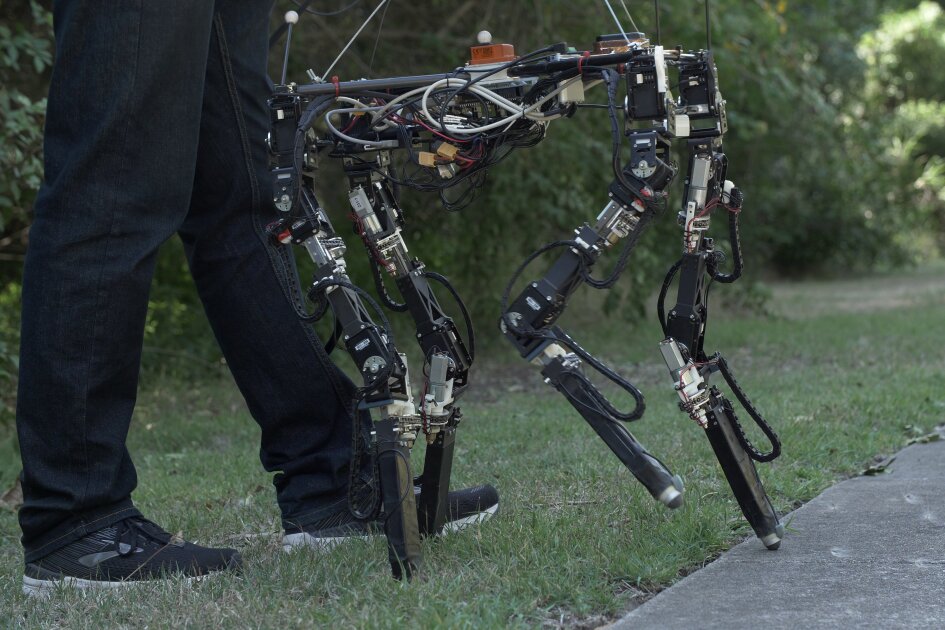 Od trave do betona: golemi skok za robota koji se samostalno uči. Zasluge: Tønnes Nygaard / UiO.
Od trave do betona: golemi skok za robota koji se samostalno uči. Zasluge: Tønnes Nygaard / UiO.
“Robot koristi kameru da vidikoliko je teren neravan i senzori u nogama koji određuju koliko je tvrda površina za hodanje, objašnjava Nygaard. "Diret neprestano uči o okolini kroz koju prolazi i, zajedno sa znanjem stečenim u zatvorenom u kontroliranom okruženju, to koristi za prilagodbu svog tijela."
Kad su Direta zamolili da hoda po travi, onnikad prije viđena trava. Trenirao je samo na šljunku, pijesku i betonu. Međutim, brzo je naučio hodati po australskoj travi i koja je idealna duljina nogu. Utvrđeno je da kraće noge pružaju bolju stabilnost robotu, dok duže noge pružaju veću brzinu hodanja ako je tlo dovoljno predvidljivo.
Ravan travnjak možda nije najvećiproblem, ali trava je u prirodi puna čuperka i rupa koje mogu zarobiti dugonogog robota, pa Dairet skraćuje noge. Na betonu ih može izvući i "pobjeći".
Robot se također prilagođava oštećenjima prilikom udaranja u nepredviđene prepreke.
“Upotrebom naše tehnologije, robot možeprilagoditi se da mu jedna noga oslabi ili se slomi. Može naučiti oporavljati se šepajući ili smanjujući duljinu svoje ostale tri noge,” kaže Nygaard. Učeći iz svojih grešaka i kvarova, Dayret se bolje prilagođava svojoj okolini.
Sve dok Dairet nije spreman pristupiti ozbiljnomzadaci. Cilj Nygaardova doktorata bio je razviti tehnologiju i pronaći prikladne materijale te dokazati da je to moguće. Međutim, on vidi nekoliko mogućih budućih upotreba. Na primjer, robot je koristan u operacijama traganja i spašavanja, kao i u poljoprivredi, gdje postoji širok raspon teških površina i vremenskih uvjeta. Također, Dairet će pomoći u istraživanju mina do kojih je ljude teško doći.
Čitaj više
Fizičari su stvorili analog crne rupe i potvrdili Hawkingovu teoriju. Kamo vodi?
Uran je dobio status najčudnijeg planeta u Sunčevom sustavu. Zašto?
Znanstveni instrument SuperCam tvrtke Perseverance rover šalje prve rezultate na Zemlju