A Cambridge-i Egyetem mérnökei egy puha, rányomtatott robotkezet fejlesztettek ki
A kutatók nyomtatott anyagot használtakEgy antropomorf kéz, amelyet tapintási érzékelőkkel ültettek be egy 3D nyomtatóba, hogy a kéz „érezze”, amit megérint. A kéz csak passzív mozgásra volt képes a csukló alapján. "Ennek a kialakításnak a nagy előnye az a mozgástartomány, amelyet működtetőelemek használata nélkül tudunk elérni" - mondják a szerzők.
„Passzív” robotkar képzése. Videó: Cambridge-i Egyetem
A tudósok több mint 1200 tesztet végeztek robotkarral,figyeli, hogy képes-e megragadni a kis tárgyakat anélkül, hogy elejtené azokat. Kezdetben a robotot kis 3D-s nyomtatott műanyag golyók segítségével képezték ki, és emberi bemutatókból származó előre meghatározott műveletekkel ragadták meg őket.
A robot próbálkozást és hibát használtmegtudja, melyik rögzítés lesz sikeres. A labdás gyakorlatok befejezése után különféle tárgyakat próbált megragadni, köztük barackot, számítógépes egeret és egy tekercs buborékfóliát. Ezekben a tesztekben a kéz 14 tárgyból 11-et tudott sikeresen megragadni.
Különböző méretű, formájú és textúrájú tárgyak rögzítése- egy embernek egyszerű, robotnak nehéz feladat. A mai fejlett robotok többsége nem képes olyan manipulatív feladatok elvégzésére, amelyeket a kisgyerekek könnyen kezelhetnek. Például az emberek ösztönösen tudják, mekkora erőt kell kifejteni egy tojás felemeléséhez, de egy robot számára ez problémát jelent: ha nem elég erős, a tárgy leesik, a túl erős pedig eltöri a tojást.
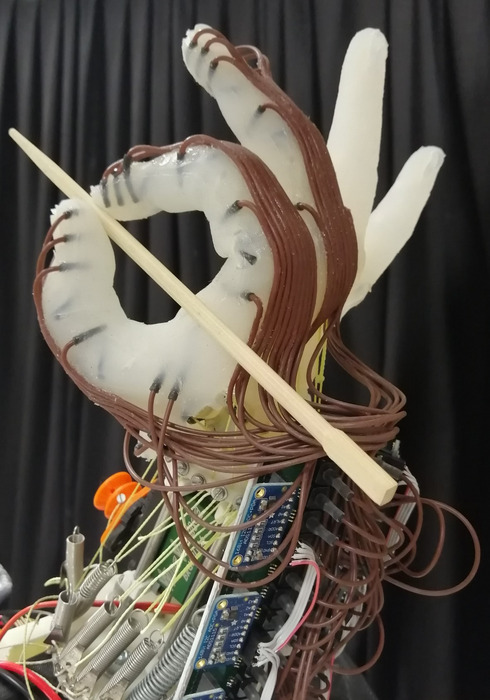 Prototípus robotfogó. Kép: Cambridge-i Egyetem
Prototípus robotfogó. Kép: Cambridge-i Egyetem
Kifinomult technológia motorizált ujjakkaljelentős mennyiségű energiát és nagyszámú bonyolult és költséges működtetőt igényel minden egyes csatlakozáshoz. A mérnökök által javasolt passzív markolatnak köszönhetően a robot sokkal könnyebben irányítható és sokkal energiatakarékosabb. A kutatók úgy vélik, hogy alkalmazkodó kialakításuk felhasználható olcsóbb, természetesebb mozgásokra képes robotika kifejlesztésére.
Olvass tovább:
Nézze meg a Mars legnagyobb felbontású térképét: 110 000 képkocka és 5,7 billió pixel
Kvarkok "tengere" egy protonon belül: miből áll egy elemi részecske
A Hubble új képe megzavarta a tudósokat
A borítón: egy prototípus robotfogó. Kép: Cambridge-i Egyetem