A közelmúltban a tudósok tanulmányt végeztek, amelynek célja az emberi meghatározási képesség megismétlése
A cikk rávilágít az olyan robotok fejlesztésének előnyeire, amelyek érintéssel, nem csak látás és hangfeldolgozás révén képesek kölcsönhatásba lépni a környezettel.
Munkánk célja ennek bemutatása voltA nagy felbontású tapintható érzékeléssel az ismert tárgyak már az első érintkezéstől kezdve pontosan lokalizálhatók. Ez fontos előrelépés a tapintható lokalizációval kapcsolatos korábbi munkákhoz képest, mivel nem hagyatkozunk semmilyen más külső észlelési módra (pl. látás) vagy a manipulált tárgyakkal kapcsolatos, korábban gyűjtött tapintható adatokra.
Maria Bauza, az egyik kutató
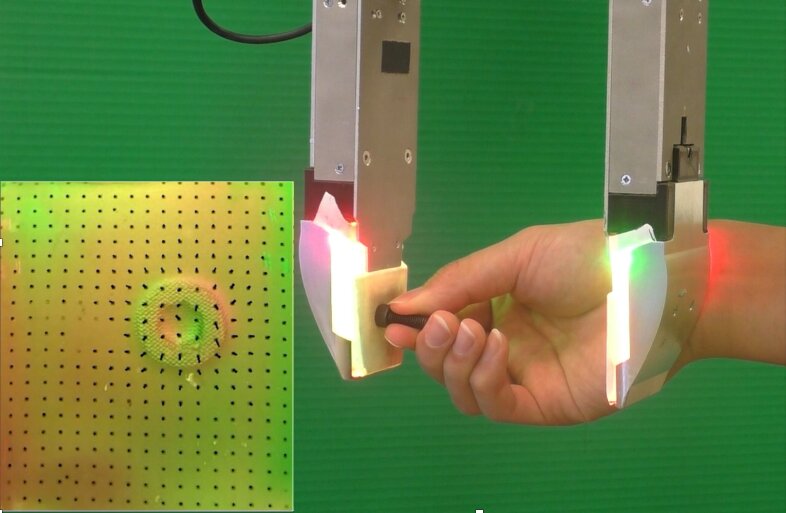
Az új technika a szimulációból tanul, és nemkiterjedt adatgyűjtést igényel. Kezdetben a kutatók olyan struktúrát fejlesztettek ki, amely szimulálja az adott objektum és a tapintási szenzor közötti kapcsolatokat, feltéve, hogy a robotnak hozzáférése van az objektum adataihoz, amellyel kölcsönhatásba lép (például háromdimenziós alakjáról, tulajdonságairól stb.).
Ezután a kutatók moderngépi tanulási módszerek a számítógépes látás és a reprezentáció tanulásához, hogy a robot által gyűjtött valós tapintási megfigyeléseket a szimulációs folyamat által generált kontaktusokhoz igazítsák.
Lényegében ez a csoport által kidolgozott módszera kutatók egyszerűen modellezhetik a kapcsolattartási információkat egy objektum háromdimenziós alakja alapján. Ennek eredményeként nincs szükség az objektum gondos tanulmányozása során gyűjtött előzetes tapintható adatokra. Ez lehetővé teszi, hogy a technika pózbecsléseket generáljon egy objektumra a robot tapintási érzékelőinek első érintésére.
Olvass tovább
A Föld 20 év múlva éri el a kritikus hőmérsékletet
Abortusz és tudomány: mi lesz a gyerekekkel, akik szülni fognak
Egy olyan növényt neveztek el, amely nem fél az éghajlatváltozástól, és egymilliárd ember táplálja