A Dyret név (norvégul "állat") a Dynamic Robot for Embodied Testing rövidítése.
„Bemutattuk a lét előnyeita robot folyamatosan képes alakot alakítani. Robotunk bizonyítja, hogy ezt a modern technológiával könnyen meg lehet valósítani. ”- magyarázza Tonna Nygaard, az UiO Informatikai Tanszékének vezető oktatója.
Dairet esetében a test átformálása azt jelenti, hogy ő szabályozza a lábak hosszát. A testalkat adaptációs mechanizmusa nagyon hasznosnak bizonyult a robot számára.
A tudósok korábban kimutatták, hogy robotjuk alkalmazkodikkülönböző környezetekbe ellenőrzött beltéri körülmények között. Ezután Nygaard hat hónapot töltött mérnöktársainál az ausztráliai Commonwealth Tudományos és Ipari Kutatási Szervezetnél (CSIRO). Szakterülete az önállóan tanuló robotok kültéri tesztelése.
„Régebben azt hitték, hogy túl nehézelérni a való világban. A robotok és a kísérleteink segítségével megmutattuk, hogy ez lehetséges” – magyarázza Nygaard a Titan.uio.no-nak adott interjújában. A munka eredményeit a folyóiratban tették közzé.Természet gépi intelligencia.
A lába hosszának megváltoztatásával a robot képesautomatikusan megváltoztatja a test alakját. A morfológiailag alkalmazkodó robotok kiszámíthatatlan környezetben működhetnek, és új kihívásokkal nézhetnek szembe anélkül, hogy minden egyes struktúrát át kellene tervezniük vagy újjá kellene építeniük minden alkalommal, amikor valami váratlan dologgal találkoznak.
Az emberek számára nehéz elképzelni, milyen nehéz egy robotnak például a betonról a fűre mozognia. Ne felejtsük el, hogy egy embernek sok éves tapasztalata van, és nagyon sok érzése van egy robothoz képest.
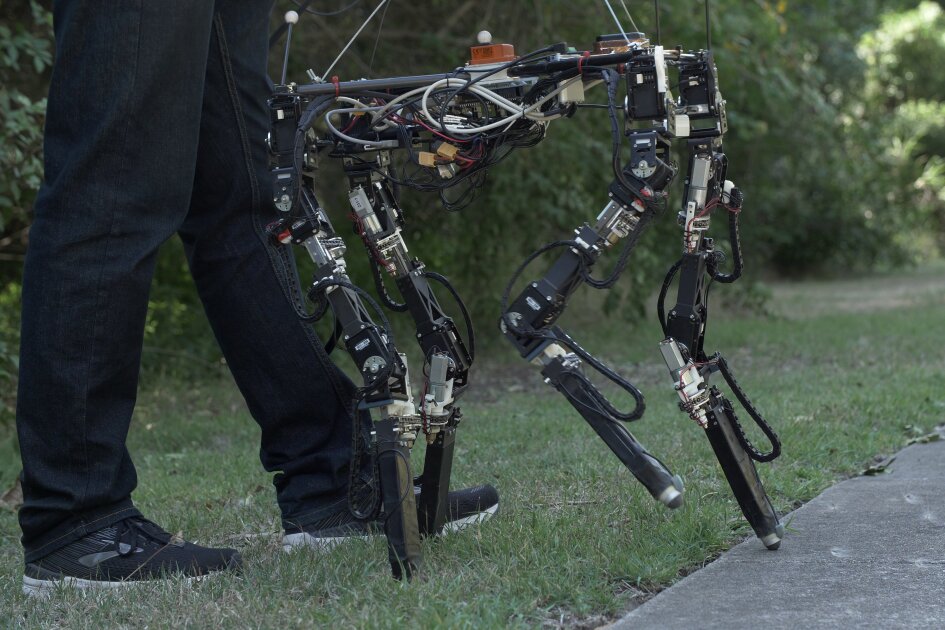 Fűtől betonig: óriási ugrás az önállóan tanuló robot számára. Hitel: Nyøard Tønnes / UiO.
Fűtől betonig: óriási ugrás az önállóan tanuló robot számára. Hitel: Nyøard Tønnes / UiO.
„A robot a kamerával látjamennyire durva a terep, és a lábakban található érzékelők meghatározzák, hogy a felület milyen nehéz járni - magyarázza Nygaard. "Diret folyamatosan megismeri azt a környezetet, amelyen keresztül jár, és a kontrollált környezetben a beltéren megszerzett tudással kombinálva használja ezt testének adaptálására."
Amikor Diretet megkérték, hogy járjon a füvön, őmég soha nem látott füvet. Csak kavicson, homokon és betonon edzett. Azonban gyorsan megtanult ausztrál füvön járni, és milyen volt az ideális lábhossz. Megállapították, hogy a rövidebb lábak jobb stabilitást biztosítanak a robot számára, míg a hosszabb lábak nagyobb járási sebességet biztosítanak, ha a talaj elég kiszámítható.
A lapos gyep nem biztos, hogy a legnagyobbprobléma, de a fű a természetben tele van csomókkal és lyukakkal, amelyek csapdába ejthetik a lábak robotját, ezért Dairet lerövidíti a lábát. Betonon kihúzhatja őket és "elfuthat".
A robot előre nem látható akadályok ütésekor is alkalmazkodik a károkhoz.
„Technológiánk segítségével a robot képesalkalmazkodni az egyik lába gyengüléséhez vagy eltöréséhez. Meg tud tanulni felépülni, ha sántikál, vagy csökkenti másik három lábának hosszát” – mondja Nygaard. Ha tanul a hibáiból és meghibásodásaiból, Dayret jobban alkalmazkodik a környezetéhez.
Amíg Dairet nem áll készen arra, hogy komolyan foglalkozzon velefeladatok. Nygaard PhD célja a technológia fejlesztése és a megfelelő anyagok megtalálása volt, valamint annak bizonyítása, hogy ez lehetséges. Számos lehetséges jövőbeni felhasználást lát azonban. Például a robot hasznos a keresési és mentési műveletekben, valamint a mezőgazdaságban, ahol a nehéz felületek és az időjárási körülmények széles skálája található. Ezenkívül a Dairet segít olyan aknák feltárásában, ahová az embereket nehéz eljutni.
Olvass tovább
A fizikusok létrehozták a fekete lyuk analógját, és megerősítették Hawking elméletét. Hova vezet?
Az Uránusz a Naprendszer legfurcsább bolygójának státuszát kapta. Miért?
A Perseverance rover SuperCam tudományos műszere elküldi az első eredményeket a Földre