Kik a robotok?
Néhány évvel ezelőtt egy klassz dolog jelent meg a Redditen - írták le a tudósok a komplexumot
A robotika egy szinergikus alkalmazotttevékenységi köre. Programozásból, mechatronikából és kibernetikából áll. A mechatronika olyan dolog, amely kölcsönhatásba lép a való világgal. A kibernetika pedig egy több linkből álló tudomány, amely mindenekelőtt a létrehozott programok kezelését foglalja magában.
Mi az a robot?15 évvel ezelőtt sokan azt mondták volna, hogy ez egy robotkar, ami gyárban dolgozik és hegesztéssel vagy festéssel foglalkozik. Egy másik népszerű válasz az androidos robot a filmvilágból. De vajon egy mozgó kocsi vagy egy pilóta nélküli jármű egy robot? Igen, ez is a robotika egyik területe. A repülőgépek is robotok, a legújabb fejlesztések egy része intelligens technológiákat tartalmaz, és valójában autonóm robotok.
 A mobil kocsi is egy robot
A mobil kocsi is egy robot
A robotikának van egy olyan területe is, mint a mezőrobotika – „mobil robotika”. Ide tartozik minden olyan robot, amely mezőn, épületben vagy víz alatt mozog. A legérdekesebb alkalmazás véleményem szerint a mezőgazdaság.
A repülőgépek története
A repülőgépek története a múltban kezdődöttszázad. Előtte csak motor nélküli léggömbök repültek, és nehéz volt őket robotnak nevezni. A múlt század elején kétféle repülőgép működött - léghajók és repülőgépek. Az első irányított repülést a Wright fivérek hajtották végre. Ráadásul az első robotpilóta elég gyorsan megjelent, majd 10 évvel később segített stabilizálni a repülést.
A robotika jelenlegi iránya összefüggúj nyílt robotpilóták, például a PixHawk fejlesztése és elérhetősége (a PixHawk nyílt hardver vezérlőkhöz, drónokhoz és egyéb UAV-okhoz. Tudományos, amatőr és professzionális célokra használják). A drónok minden ember életébe való érkezésére példa a Dodo Pizza cég pizzaszállítása a Copt Expressszel közösen – ez történt 2014-ben.
 A repülőgépek története
A repülőgépek története
Hogyan vezérlik a drónt
A modern repülőgépek ilyet használnakaz emelés létrehozásának három alapelve közül - aerosztatikus, sugárhajtású vagy aerodinamikus. A repülés aerodinamikai elve és az emelés létrehozása (ledobja a levegő egy részét) akár a teljes berendezés mozgása, rögzített csapágyfelülettel (szárny) vagy az egyes csapágyalkatrészek mozgása révén valósítható meg. a berendezés (főrotor, ventilátor) levegőhöz viszonyított helyzete.
 Hogyan repülnek az eszközök
Hogyan repülnek az eszközök
A drónnak van egy légcsavarja, amely emelést hoz létre.A földről felszállva a készülék gyorsabban kezdi mozgatni a légcsavart és felemelkedik. De a cselekvés ereje egyenlő a reakció erejével. Amikor a légcsavar forog, egy pillanat keletkezik az ellenkező irányba - ez a helikopterek és helikopterek kialakítása. Ha a helikopternek egy légcsavarja van, az nem lesz stabil. Ezért a készülék kétrotoros sémát vagy farokrotort használ.
A quadcopter nagyon egyszerű kialakítású -általában négy csavar van benne, ebből kettő az egyik, kettő pedig a másik irányba forog. Ha a felhasználónak előre kell haladnia, egyes légcsavarok lassabban, míg mások gyorsabban forognak. És ha a felhasználó meg akar fordulni, akkor egyes átlósan elhelyezett csavarok gyorsulnak, míg mások lelassulnak.
 Hogyan repül a quadcopter
Hogyan repül a quadcopter
A kopter mozgása a sarkokban összefügg a menti mozgássalkoordináták. Ha a pilóta előre akar haladni, először előre kell döntenünk a drónt, majd ahogy az elektromos eszköz előre húzódik, stabilizáljuk azon a ponton, ahol maradni szeretnénk.
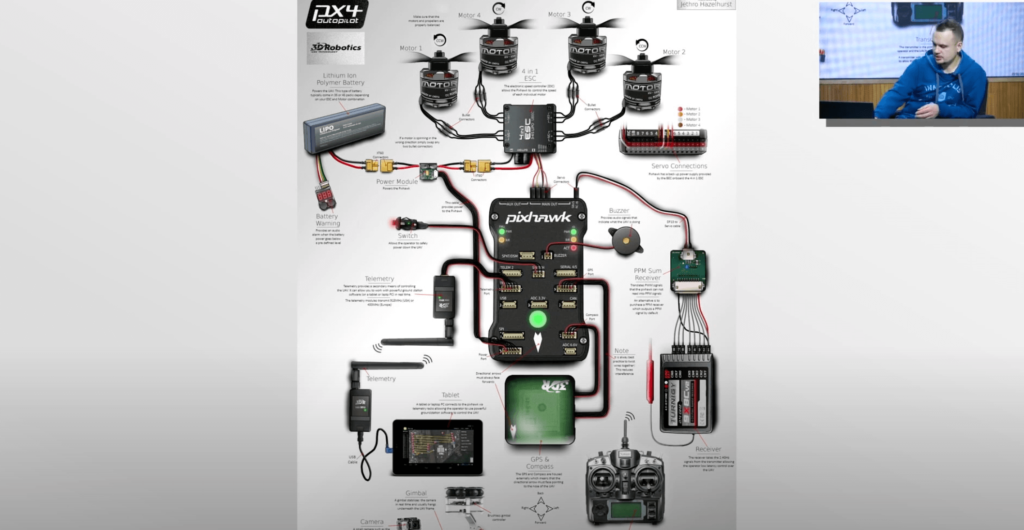
Ez az egyik legnépszerűbb robotpilóta diagramja,amelyek alapján új készülékek készülhetnek. Minden motorhoz és érzékelőhöz csatlakozik. Ezenkívül a motorok saját vezérlőegységgel rendelkeznek, az ESC szabályozó - Electronic Speed szabályozó, amely szabályozza a motor fordulatszámát.
A szenzorok közül van GPS, hogy a drón tuddolgozzon a szabadban, repüljön a pontokra és stabilizálja a pozíciót. De magában az autopilotban is van egy IMU - egy inerciális érzékelő modul, amely lehetővé teszi a helyzetszögek meghatározását. Van még egy kommunikációs csatorna, egy földi irányító állomás és egy akkumulátor.
 UAV eszköz
UAV eszköz
Mint fentebb említettük, van egy szintmotorvezérlés - habozás nélkül beállíthatjuk a forgási sebességet. A többi szint ugyanezen az elven működik: a következő az orientációvezérlés.
De először szabályoznunk kell a forgási sebességet- Ezen a szinten repülnek az FPV-kopterek (olyan eszközök, amelyek lehetővé teszik, hogy a drón kamerájából valós időben, első személytől nézze a képet (FPV – First Person View). A tapasztalt pilóták állítják be a forgási sebességet és folyamatosan kormányozzák a joystickkal. A következő Ez az a szakasz, amikor a felhasználó stabilizálni tudja a szöget, de a drón továbbra is mozog. Következik a sebességszabályozás, a legmagasabb pedig a helyzetszabályozás, a manőverek egy ponthoz való mozgáshoz vagy egy adott pálya mentén történő mozgáshoz.
Azok, akik szeretnének programozni, építeni illdrónok vezérlése – figyelni kell a PIX4 nyílt forráskódú robotpilótára. A légi robotika (ROS - robotikus operációs rendszer, vagy Open robotika) körül egy egész közösség él, vannak szimulátorok a drónokhoz. Ezért sok kísérletet el lehet végezni a szimulátorban a drón nélkül.
A drónok fejlesztési szakaszai
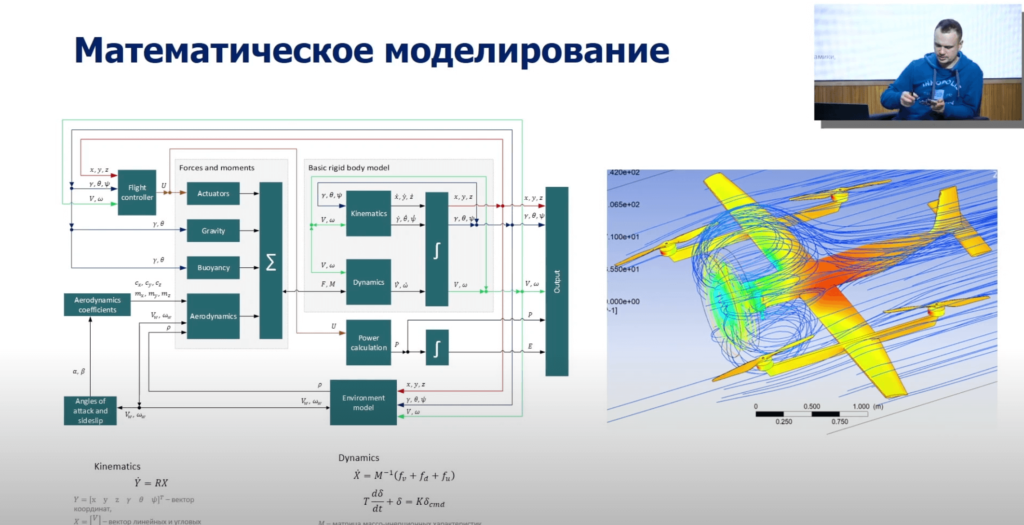
A kutatók egy koncepcióval kezdikmodellezést, majd meg kell alkotniuk a készülék pontos modelljét. Anélkül, hogy belemennénk a képletbe, a helikoptermodell lényegében egy merev karosszéria-modell. Ez Newton második törvénye, amelyet a részecskerendszerekre is kiterjesztenek. Van transzlációs és forgó mozgása, van mozgáskinematika és dinamika, és ahhoz, hogy egy adott eszköz modelljét leírhassuk, ide kell hozzáadnunk egy adott drónra ható erők egyenletét.
 Hogyan modellezik az UAV-kat
Hogyan modellezik az UAV-kat
A következő lépés a rendszer fejlesztésemenedzsment. Ha a klasszikus úton haladunk: először megtudjuk a pontos matematikai modellt, és ennek alapján már szintetizáljuk a vezérlőalgoritmust vagy új képleteket. A vezérlőrendszerbe minden szint beilleszthető: mozgástervezés, környezetészlelés, állapotbecslés érzékelők segítségével. Az algoritmusok lehetővé teszik, hogy pontosítsuk koordinátáinkat és adatainkat.
 Drón irányító rendszer
Drón irányító rendszer
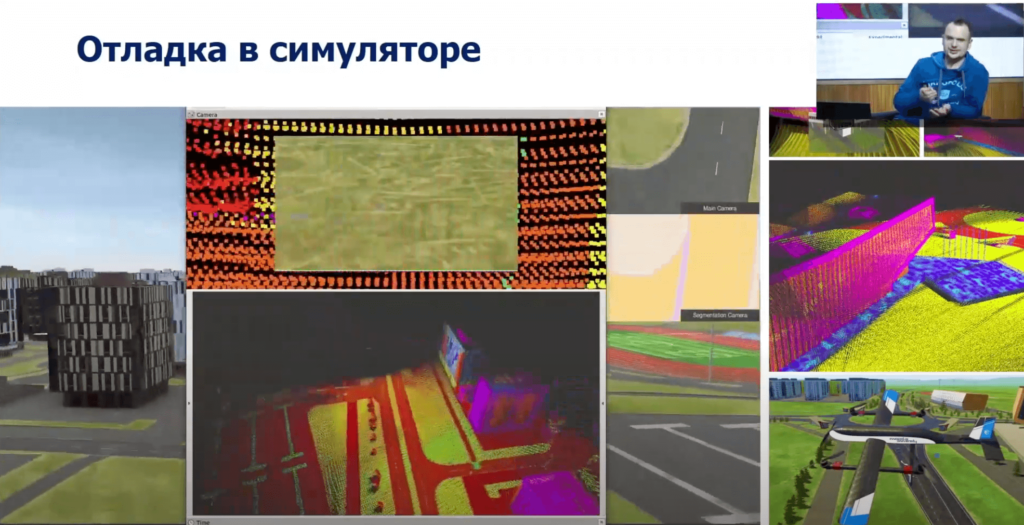
Ha van vezérlőalgoritmus, azonnal lehetalkalmazni, de ez meglehetősen költséges. Az eszközök a legkisebb hibára összeomlanak – ezt figyelembe kell venni, és biztonsági másolatot kell készíteni. A teszteléshez szimulátorokat használnak.
Az alábbiakban egy virtuális túrát láthatunk Innopolisbanegyetemünk terméke, letölthető a GitHubon. Ez nem csak egy vizuális komponens, hanem a készülék összes érzékelőjének adatai is. Minden helyzetérzékelővel rendelkezik, drónként vezérelhető, és minden vezérlőalgoritmust képes hibakeresni.
 Hogyan tanulnak a drónok a szimulációban
Hogyan tanulnak a drónok a szimulációban
A szimulátorral kapcsolatos tapasztalatok alapján megjeleniknagyobb magabiztosság – továbbléphet a hardveres megvalósításra. Itt láthatók az alkatrészei: a készülék karbonból és kompozitból történő gyártása, elektronika megalkotása, motorok elhelyezése, rögzítése.
A tesztek nem az utcán kezdődnek:Először az eszközöket egy felfüggesztésen vagy egy speciális állványon tesztelik. Használhatók egy pilóta nélküli légi jármű működésének elemeinek hibakeresésére. Itt például egy függőleges fel- és leszálló repülőgép látható - ez egy helikopter és egy repülőgép hibridje, a videóban láthatja, hogyan birkózik meg a külső zavarokkal, és hogyan tart szöget. A jobb oldalon egy elég őrült kísérlet látható, ahol egyszerre öt motort indítasz be, és megnézed, hogyan kezeli a vezérlőrendszer.
 Hogyan épülnek fel a drónok
Hogyan épülnek fel a drónok
A tesztelés után továbblépnek a repülésekre -kis felszállások alacsony sebességnél, irányított mozgás pilótával, aki át tudja venni az irányítást. Az utolsó akkord egy teljesen pilóta nélküli repülés.
A készülék függőlegesen felszáll -„mint egy helikopter”, ekkor bekapcsol a főmotorja, a drón felgyorsul, repülőgép üzemmódba kapcsol, és elegendő sebességet fejleszt a szárny működéséhez. Ezután a kontúr propellereket kikapcsolják, és úgy repül, mint egy repülőgép – a leszállási folyamat fordított sorrendben történik.
Mi történik a drónokkal
Az egyik olyan feladat, amely a moderntudósok — az akadályok megkerülése repülés közben. Egyes drónok már tudják, hogyan kell ezt megtenni, de a feladat egy kicsit szélesebb - meg kell tanítani az eszközöket, hogy a lehető leggyorsabban mozogjanak akadályokkal teli környezetben. És még van hová törekedni és javítani az algoritmusokon.
Egy másik példa az ilyen tesztelésre a repülés ideerdő. Van egy nagyon érdekes megközelítés - itt nem csak új algoritmusokat használnak, hanem szenzorokat is - eseménykamera. Ez egy nagyon magas frekvenciájú kamera, amely minden időegységben továbbítja a képkockák közötti különbséget: ez lehetővé teszi az akadályok gyors irányítását és reagálását.
A drónok mozgástervezése terénverseny: ki csinálja gyorsabban. A feladat egy ismeretlen terület feltérképezése, háromdimenziós ábrázolásának felépítése, tárgyak keresése rajta. Repültünk az egyetemen, de megoldottuk a tárgykeresés problémáját is. Eredményeink még az ismert publikált algoritmusoknál is jobbak voltak.
Versenyek zajlanak a drónok versenyében.Kamerás eszközökön készülnek, amikor a pilóta szemüveges és irányítja a drónt, hogy a lehető leggyorsabban átrepüljön a kapun. Egészen látványos esemény, ahol ugyanazt a feladatot kell automata üzemmódban végrehajtani. Sajnos a számítógépnek eddig csak sakkban sikerült embert legyőznie, emberpilótát pedig a drónrobotnak sem sikerült megelőznie, pedig már elég komoly a fejlődés. Egy gépi látási algoritmus segítségével egy drón ilyen feladatokat is el tud végezni, a munka csak a sebesség növelésén van.
Egy másik verseny a Microsoft Games ofdrónok, szimulátorban hajtják végre. Szaúd-Arábia egyik híres vezető versenyét ugyanitt rendezik. Az ottani résztvevőket három évre előre toborozzák.
A drónbemutatókhoz pilóta nélküli eszközöket használnak- Ezek olyan látványos események, amelyek mára a tűzijátékot váltották fel. De nem ez az egyetlen csoportos használat – nagyobb területet is megvizsgálhatnak.
Ahol alkalmazható
Hogy ne tűnjön kizárólag tudományosnakfejlesztés, lent a Skydio drón bemutatója látható. Most ez a legfejlettebb eszköz az autonómia szempontjából. Ez egy példa arra, hogy a modern technológiákat - térképészetet, akadályelkerülést, forgalomtervezést - együtt alkalmazzák a felhasználó számára már elérhető termékben.
Egy másik irány az új dizájnrepülőgép. Az egyik az összecsukható drónok. Az egyik ilyen eszköz baleset után szűk helyekre repülhet ellenőrzés céljából. Egy másik példa egy drón, amely képes kibontakozni. Például ki tud repülni egy keskeny pneumatikus csőből, majd a szokásos módon repül.
Ezen a területen is van egy projektünk – ez azpuha Tensodron. Ez az első softshell drón, amely repül. Az az öröm, hogy le tudod ejteni, és sértetlen marad. Ezenkívül módosíthatja a gerendák hosszát, a kábelek feszességét.
Két példa, ami életre kelhamar. Először is, szállítás drónokkal. Most van egy nagyon érdekes megvalósítás, ahol csomagautomatát és drón leszálló állomást kombinálunk – ebben az esetben nem kell aggódnunk, hogy mikor érkezik meg a drón, hova fog leszállni, hogy el tudjuk érni időt, és vegye fel a rakományt, mielőtt ellopják. A második példa egy repülő taxi. Ez a fejlesztés legizgalmasabb területe, és már léteznek működő prototípusok. De ez csak a következő évtizedben fog megtörténni.
Milyen fejlesztések történtek a repülő taxik területén az elmúlt 6 évben:
- A "Hover" cég bemutatott egy készüléketalacsony zajszintű villanymotor és kompakt méretek – mint egy autó. 150 m magasra száll fel, és egy normál parkolóhelyen landol. A drónt két utas számára tervezték, maximális teherbírása 300 kg, sebessége 200 km/h.
— 2016-ban az orosz Hoversurf cégbemutatott egy hoverbike-ot, amelyet magaddal vihetsz, és bármikor felszállhatsz egy normál városi parkolóból. Akár 100 km/h-s sebességet is elér, az emelési magasságot pedig biztonsági okokból erőszakosan 5 méterre korlátozzák.
— 2018-ban az Airbus utas által kifejlesztettAz Alpha One VTOL repülőgép 5 méter magasra emelkedett, és 53 másodpercig maradt a levegőben. A felhasználó az alkalmazáson keresztül hívhatja az UAV-t, és eljuthat egyik pontból a másikba a városon belül és azon kívül is.
— 2020-ban a CityAirbus légitaxi készültelső ingyenes repülés. Párizs külvárosában, Ile-de-France városában zajlottak a tesztek, a CityAirbus repülőgépe akár 120 km/órás sebességgel is képes haladni 30 km távolságig. A repülő taxi tömege több mint 2,2 tonna, a CityAirbus három utasüléssel és egy vezetőüléssel van felszerelve.
- 2022-ben a Pantuo Aviation kínai startup bemutatta a T1-et, egy légcsatornás repülő taxit. 300 km/h feletti sebességgel repül, hatótávolsága pedig 250 km.
Olvass tovább:
Az űrszonda 200 km-re repült a Merkúrtól. Nézd, mit látott
A tudósok feltárják, hogyan befolyásolják a vitaminok a rák előfordulását
A kínai gondolatolvasó sisak megszólaltatja a vészjelzőt, ha valaki pornótartalmat lát