Gli ingegneri dell'Università di Cambridge hanno sviluppato una morbida mano robotica stampata su di essa
I ricercatori hanno utilizzato la stampaStampata in 3D una mano antropomorfa con sensori tattili impiantati in modo che la mano possa “sentire” ciò che tocca. La mano era capace solo di movimenti passivi basati sul polso. "Il grande vantaggio di questo progetto è la gamma di movimento che possiamo ottenere senza l'utilizzo di attuatori", affermano gli autori.
Addestrare un braccio robotico “passivo”. Video: Università di Cambridge
Gli scienziati hanno condotto più di 1.200 test con il braccio del robot,osservando la sua capacità di afferrare piccoli oggetti senza farli cadere. Il robot è stato inizialmente addestrato utilizzando piccole palline di plastica stampate in 3D e le ha afferrate utilizzando azioni predefinite apprese da dimostrazioni umane.
Il robot ha utilizzato tentativi ed erroriscoprire quale acquisizione avrà successo. Dopo aver finito di esercitarsi con le palline, ha provato ad afferrare vari oggetti, tra cui una pesca, il mouse di un computer e un rotolo di pluriball. In questi test la mano è riuscita ad afferrare con successo 11 oggetti su 14.
Cattura oggetti di diverse dimensioni, forme e trame- un compito semplice per una persona, ma difficile per un robot. La maggior parte dei robot avanzati di oggi non sono in grado di eseguire compiti manipolativi che i bambini piccoli possono facilmente gestire. Ad esempio, le persone sanno istintivamente quanta forza occorre applicare per sollevare un uovo, ma per un robot questo è un problema: una presa non abbastanza forte farà cadere l'oggetto, mentre una presa troppo forte si romperà. l'uovo.
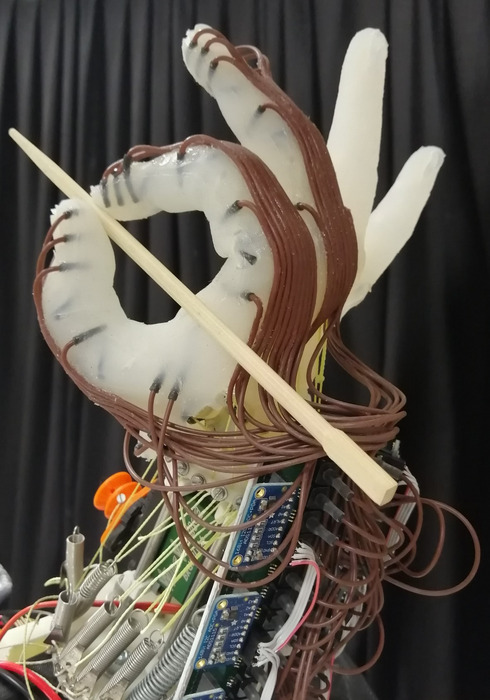 Prototipo di pinza robotica. Immagine: Università di Cambridge
Prototipo di pinza robotica. Immagine: Università di Cambridge
Tecnologia sofisticata con dita motorizzaterichiede una notevole quantità di energia e un gran numero di attuatori complessi e costosi per ciascun giunto. La presa passiva proposta dagli ingegneri rende il robot molto più facile da controllare e molto più efficiente dal punto di vista energetico. I ricercatori ritengono che il loro design adattabile potrebbe essere utilizzato per sviluppare una robotica a basso costo capace di movimenti più naturali.
Leggi di più:
Guarda la mappa di Marte con la risoluzione più alta: 110.000 fotogrammi e 5,7 trilioni di pixel
"Mare" di quark dentro un protone: in cosa consiste una particella elementare
La nuova immagine di Hubble lascia perplessi gli scienziati
In copertina: un prototipo di pinza robotica. Immagine: Università di Cambridge