Gli ingegneri dell'École Polytechnique Fédérale de Lausanne hanno sviluppato un metodo che consente a un robot di farlo
Atterraggio di ornitotteri. Video: EPFL
Atterrare un uccello su un ramo sembra essere uno dei piùprocessi naturali. Ma in realtà richiede un equilibrio estremamente preciso tra tempo, forza d'impatto, velocità e precisione di movimento, gli autori della nota di sviluppo. Non sorprende che fino ad ora gli ingegneri non siano stati in grado di riprodurre questi movimenti nei robot.
 Sistema di atterraggio per ornitotteri. Immagine: Raphael Zufferey et al., Nature Communications
Sistema di atterraggio per ornitotteri. Immagine: Raphael Zufferey et al., Nature Communications
I ricercatori hanno risolto il problema dell'equilibrio precisodotare l'ornitottero di un computer di bordo e di un sistema di navigazione. Utilizza fonti esterne per acquisire il movimento e determinare la posizione del dispositivo. L'appendice ad artiglio dell'ornitottero è stata calibrata con precisione per compensare le vibrazioni su e giù durante il volo mentre il drone tentava di afferrare un trespolo.

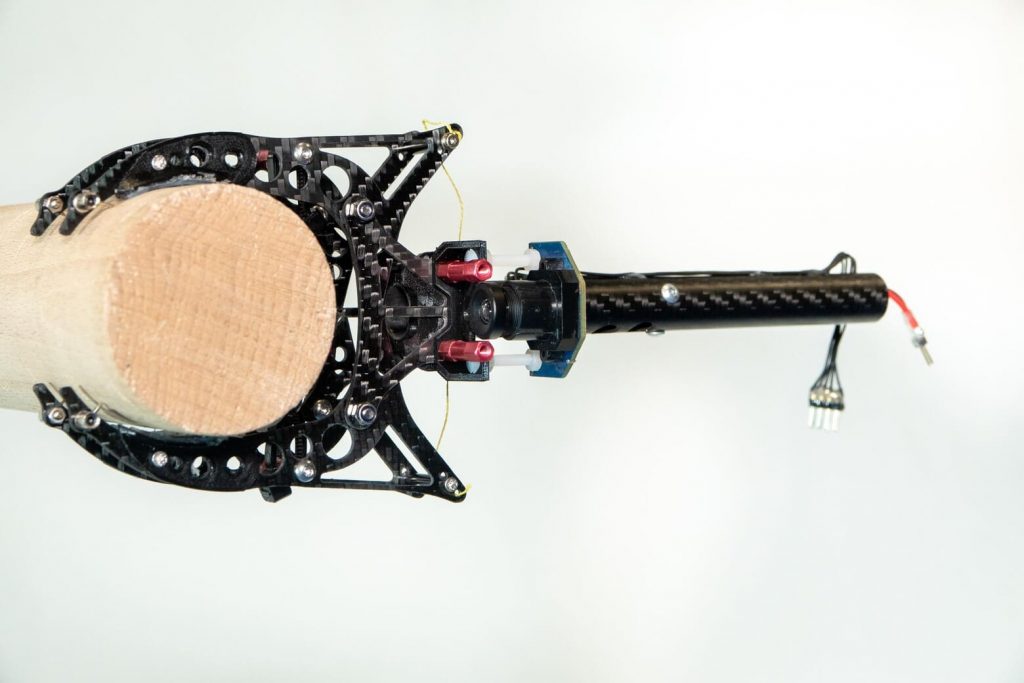
Montatura per ornitotteri. Immagine: EPFL
L'artiglio stesso è stato progettato in modo tale cheassorbono lo slancio del movimento del robot all'impatto e si chiudono in modo rapido e sicuro per sostenerne il peso. Una volta sul trespolo, il robot rimane sul trespolo senza spendere energia. I ricercatori stanno attualmente conducendo test di volo in laboratorio.
Una volta che l'ornitottero impara da soloatterrare su un ramo di un albero, sarà in grado di svolgere determinati compiti, come raccogliere discretamente campioni biologici o effettuare misurazioni dall'albero. Alla fine, potrebbe persino atterrare su strutture artificiali, che potrebbero aprire nuovi usi.
Raphael Zufferey, coautore dello sviluppo
Leggi di più:
Due pianeti sono stati trovati non lontano dalla Terra. Forse sono abitate
Una meteora unica ha riscritto la storia del sistema solare: da dove viene
Il modulo prototipo della nuova ISS è stato fatto saltare in aria al centro della NASA. Guarda com'era