Recentemente, gli scienziati hanno condotto uno studio volto a replicare la capacità umana di determinare
L'articolo evidenzia i vantaggi dello sviluppo di robot in grado di interagire con l'ambiente attraverso il tatto, non solo la visione e l'elaborazione del suono.
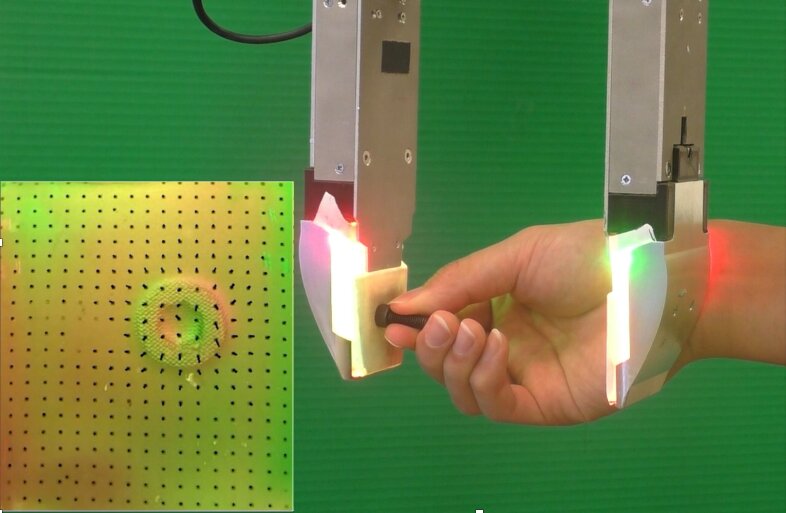
L'obiettivo del nostro lavoro era dimostrarlo conGrazie al rilevamento tattile ad alta risoluzione, gli oggetti conosciuti possono essere localizzati con precisione già dal primo contatto. Si tratta di un importante progresso rispetto al lavoro precedente sulla localizzazione tattile, poiché non facciamo affidamento su altre modalità di percezione esterna (ad esempio, visione) o su dati tattili precedentemente raccolti associati agli oggetti manipolati.
Maria Bauza, una delle ricercatrici
La nuova tecnica impara dalla simulazione e non lo farichiede un'ampia raccolta di dati. Inizialmente, i ricercatori hanno sviluppato una struttura che simula i contatti tra un dato oggetto e un sensore tattile, a condizione che il robot abbia accesso ai dati sull'oggetto con cui interagisce (ad esempio, sulla sua forma tridimensionale, proprietà, ecc.).
Successivamente, i ricercatori hanno utilizzato il modernometodi di apprendimento automatico per la visione artificiale e l'apprendimento della rappresentazione per abbinare le osservazioni tattili del mondo reale raccolte dal robot a una serie di contatti generati dal processo di simulazione.
In sostanza, il metodo sviluppato da questo gruppoi ricercatori possono modellare le informazioni di contatto semplicemente basandosi sulla forma tridimensionale di un oggetto. Di conseguenza non sono necessari dati tattili preliminari raccolti attraverso un attento studio dell'oggetto. Ciò consente alla tecnica di generare stime di posa per un oggetto dal primo tocco dei sensori tattili del robot.
Leggi di più
La Terra raggiungerà la temperatura critica tra 20 anni
Aborto e scienza: cosa succederà ai bambini che partoriranno
È stata nominata una pianta che non ha paura dei cambiamenti climatici. Nutre un miliardo di persone