Il professor Edward Anderson del Massachusetts Institute of Technology e la sua studentessa laureata Sandra Liu
L'impugnatura è composta da due dita a coste flessibili,che si adattano alla forma dell'oggetto con cui vengono a contatto. Queste dita, come in molti sviluppi simili, sono realizzate con materiali plastici flessibili su una stampante 3D. Tuttavia, nel loro robot, gli ingegneri hanno rimosso le nervature trasversali situate all'interno delle dita e conferendo loro rigidità. Invece, i ricercatori hanno installato una telecamera e sensori.
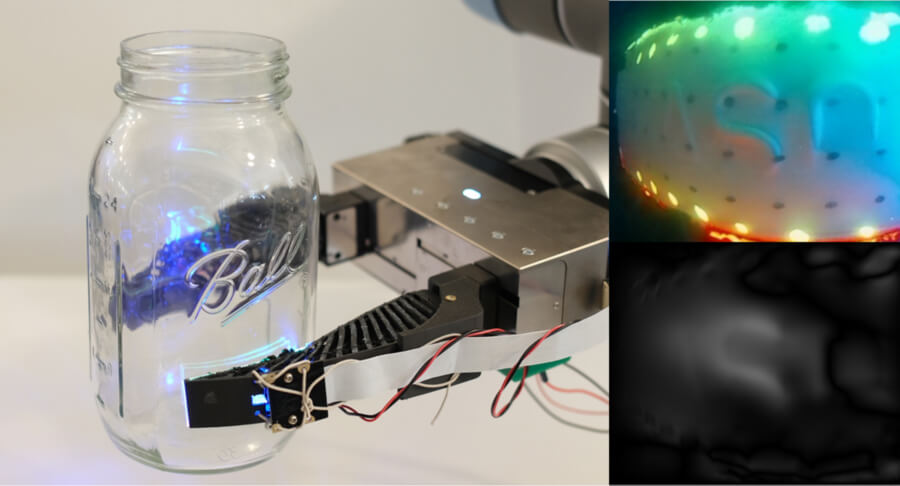
Un sottileun foglio acrilico a cui sono attaccati cuscinetti in gel di silicone “sensibili”. Una telecamera è posizionata in profondità nella cavità, diretta verso lo strato acrilico, e l'intera cavità è illuminata da LED.
Quando si tocca un oggetto, il dito si avvolge delicatamenteesso, fondendosi con i contorni dell'oggetto. La fotocamera e speciali algoritmi analizzano il cambiamento nei fogli di silicone e acrilico. Sulla base dell'analisi, il robot determina la forma generale dell'oggetto, le irregolarità della superficie, l'orientamento dell'oggetto nello spazio e la forza con cui è necessario comprimere l'oggetto.
I ricercatori hanno testato il lorocatturare toccando solo una delle due dita. Il dispositivo che hanno creato ha manipolato con successo vari oggetti, come un mini cacciavite, una fragola di plastica, un tubo di vernice e un bicchiere di vino. Allo stesso tempo, durante la cattura delle fragole, il sensore interno è stato in grado di rilevare con successo la granulosità della sua superficie e, lavorando con un barattolo, è stato in grado di leggere il nome inciso.
 Fonte: Laboratorio di informatica e intelligenza artificiale del MIT
Fonte: Laboratorio di informatica e intelligenza artificiale del MIT
Come notano gli autori dell'opera, oggetti in vetrorappresentano una sfida per i sensori di visione artificiale a causa della rifrazione della luce. I sensori tattili consentono di aggirare questa limitazione. Quando la presa sollevava il bicchiere, sentiva l'orientamento dello stelo nello spazio e poteva assicurarsi che il bicchiere fosse rivolto verso l'alto prima di abbassarlo sul tavolo.
Gli ingegneri notano che la creazione di una cavità all'internodito disturbava leggermente la stabilità della presa. Gli scienziati hanno in programma di perfezionare il design del loro dispositivo per correggere questa lacuna. Inoltre, hanno in programma di sviluppare una presa a tre dita che possa, ad esempio, raccogliere pezzi di frutta e valutarne la maturità.
Leggi di più:
Il MIT crea un motore termico stazionario che supera le turbine
Dopo dieci anni di lavoro, gli scienziati hanno messo in dubbio il modello standard della fisica
Guarda come appare l'alba su Marte