Cosa sono i robot morbidi?
La robotica soft è una branca specifica della robotica che si occupa di
La robotica morbida dipende in gran parte dacome gli organismi viventi si muovono e si adattano al loro ambiente. A differenza dei robot costruiti con materiali rigidi, i robot morbidi offrono maggiore flessibilità e adattabilità per eseguire le attività, nonché una maggiore sicurezza quando si lavora con le persone. Queste caratteristiche ne consentono l'utilizzo in medicina e nell'industria.
La robotica morbida progetta principalmenterobot realizzati interamente con materiali morbidi. Di conseguenza, i robot risultanti sembrano invertebrati come vermi o polpi. Simulare il movimento di tali robot è un compito difficile. Il fatto è che per tali processi è necessario applicare i metodi della meccanica del continuo. Questo è il motivo per cui i robot morbidi sono talvolta chiamati robot continui.
Ricordiamo, meccanica del continuo - sezmeccanica, fisica del continuo e fisica della materia condensata, dedicata al movimento dei solidi gassosi, liquidi e deformabili, nonché alle interazioni di forza in tali corpi.
Ibridi di robot morbidi e rigidi
Per studiare i fenomeni biologici, gli scienziati creano robot morbidi a immagine di organismi viventi e conducono esperimenti difficili da eseguire su organismi reali.
Tuttavia, ci sono robot rigidi che sono anche capaci di deformazione continua, come il robot serpente.
Le costruzioni morbide possono essere utilizzate come parte dirobot rigido più grande. Gli effettori morbidi robot per afferrare e manipolare oggetti forniscono un vantaggio. Il punto è che non distruggono oggetti fragili.
È anche possibile creare ibridi soft-hardrobot che hanno un telaio rigido interno ed elementi morbidi esterni. Gli elementi morbidi possono avere molte funzioni: sia meccanismi di azione simili ai muscoli degli animali, sia materiale di ammortizzazione per garantire la sicurezza in caso di collisione con l'uomo.
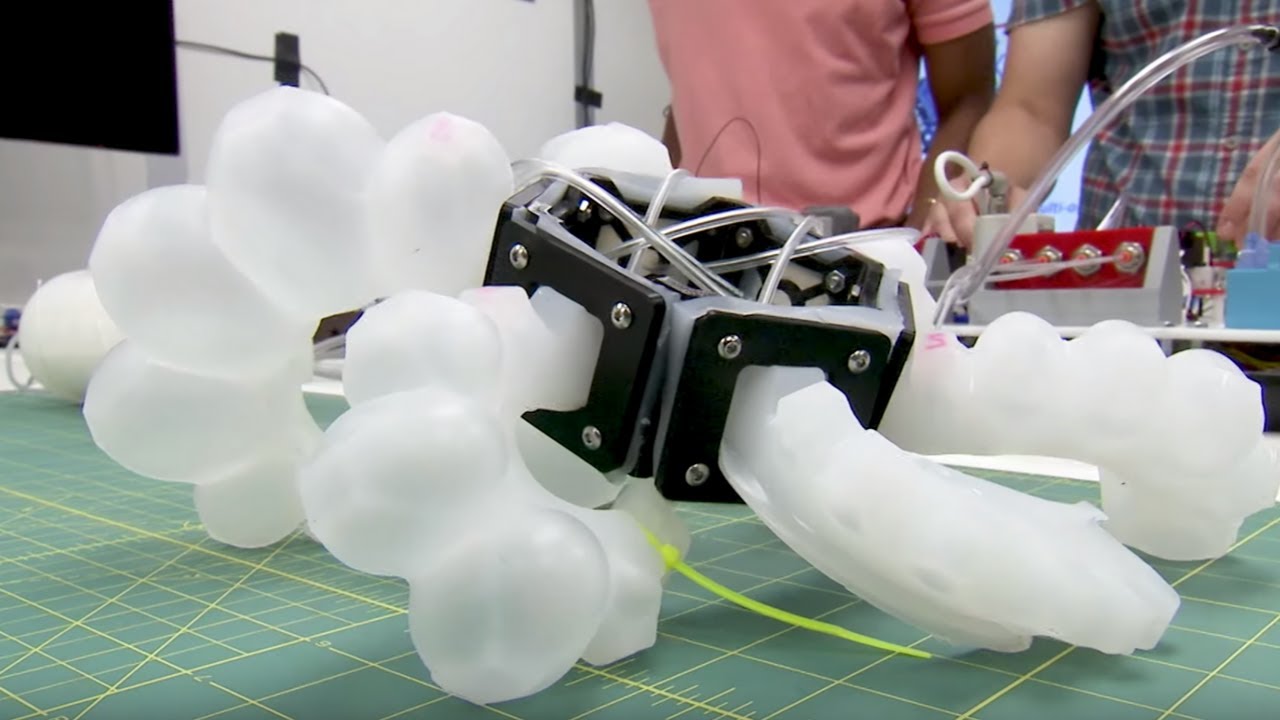
 Un robot su ruote con gambe morbide e capacità di muoversi a terra.
Un robot su ruote con gambe morbide e capacità di muoversi a terra.
Foto: Ali Sadeghi, Alessio Mondini, Emanuela Del Dottore, Anand Kumar Mishra e Barbara Mazzolai
I robot morbidi possono essere piegati in qualsiasi formamodulo. Sono realizzati con materiali molto morbidi, compresi i nanomateriali. Questo li rende più simili a parti del corpo umano, come i muscoli. In effetti, si potrebbe dire che questi robot stanno quasi prendendo vita con l’aiuto dei nanomateriali.
Nonostante le numerose ricerche nel campo dei robot morbidi, gli ingegneri sono ancora all’inizio del loro viaggio. Tuttavia, gli esperti prevedono che entro il 2024 il loro mercato raggiungerà i 2,16 miliardi di dollari.
In che modo i robot morbidi sono diversi dai normali robot?
I robot in metallo sono molto più limitati. Sono stati costruiti pensando alla velocità e alla precisione, rendendoli ideali per cose come il lavoro in catena di montaggio. Ma non sono poi così universali.
I robot morbidi sono diversi da quelli industriali orobot collaborativi in quanto la loro costruzione è realizzata con materiali morbidi e flessibili. Il loro design è molto diverso da qualsiasi altra forma di robot e similmente i robot morbidi svolgono funzioni molto diverse.
La maggior parte dei robot soft sono ancora in funzionenelle prime fasi di sviluppo e il primo robot morbido è stato sviluppato nel 2011 dal professore di Harvard George Whitesides. Da allora, il numero e i tipi di robot soft sono aumentati notevolmente. Sebbene possano essere diversi anni di distanza dalla loro effettiva redditività commerciale, rappresentano comunque una tecnologia entusiasmante con un grande potenziale.
Robot morbidi: un'entusiasmante innovazione nel mondorobotica. I cinque tipi di robot soft di cui sopra possono avere il maggiore potenziale commerciale di tutti i tipi di robot soft attualmente in fase di sviluppo.
A differenza dei robot industriali o collaborativi, i robot soft servono un'ampia varietà di applicazioni.
Come vengono utilizzati i robot soft?
Il fascino dei robot morbidi risiede nella loro flessibilità e versatilità.
6 promettenti tipi di robot soft
Esistono molti tipi diversi di robot soft, ma ci sono 6 diverse applicazioni che promettono il massimo potenziale commerciale.
- Muscoli robotici: al momento ne sono in fase di sviluppo diversi tipirobot morbidi che agiranno come muscoli robotici. Uno dei prototipi più promettenti prende ispirazione dagli origami. La sua struttura piegata può sollevare 1.000 volte il proprio peso e scalare da pochi millimetri a un metro di lunghezza. Inoltre, gli scienziati stanno ora lavorando alla creazione di robot su scala nanometrica dal DNA.
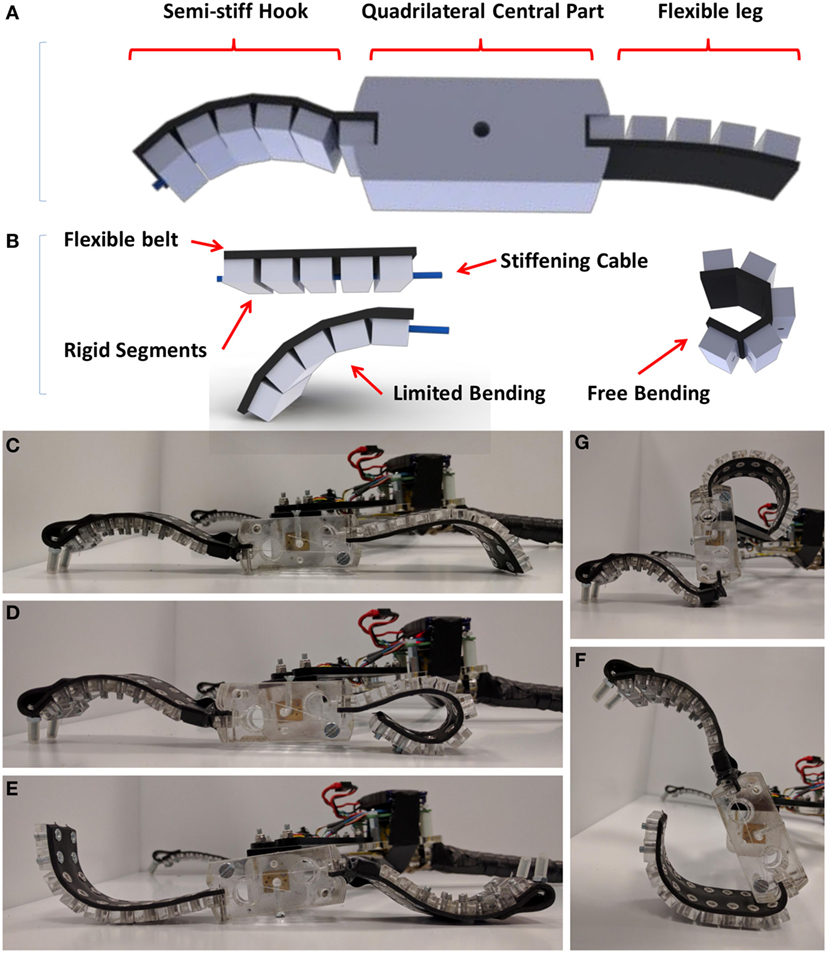
- Robot arrampicatori:questi tipi di robot hanno molte potenzialitàapplicazioni che vanno dall'ispezione e manutenzione di edifici alle operazioni di ricerca e soccorso. Una versione dei soft climbing robot ha un design curvo molto simile a un bruco. Questo gli permette di strisciare su e giù per strutture di diverse dimensioni.
- Robot commestibili. Il primo progetto di tali robot creato dal team scolastico di Philadelphia per la competizione annuale Soft Robotics. Questi robot biodegradabili possono fornire medicinali in sicurezza a varie parti del corpo.
- Robot indossabili.Questi dispositivi biomimetici possono aiutareun paziente in fase di riabilitazione fisica. Il robot morbido imita il movimento naturale del corpo ovunque si trovi, aiutando il paziente a ritrovare la normale funzione motoria.
- Robot protesici.I robot morbidi possono essere utilizzati per creareprotesi superiori per le persone a cui mancano arti o parti del corpo. Spesso, la tecnologia della robotica morbida viene utilizzata all’estremità di una mano protesica per afferrare gli oggetti in modo più delicato e preciso.
- Robot astronauti. Gli scienziati della NASA suggeriscono che un giorno voleranno sulla superficie di Marte. Altri stanno già progettando robot che lavoreranno nelle parti del corpo umano più difficili da raggiungere.
Sebbene i robot morbidi possano essere utilizzati anche inambienti industriali - soprattutto come robot collaborativi (noti anche come "cobot") che lavorano con gli esseri umani, difficilmente si limitano a questo.
Il primo robot autonomo morbido al mondo
Nel 2016, gli scienziati di Harvard hanno utilizzatogomma siliconica liquida per lo sviluppo di Octobot, il primo robot morbido autonomo al mondo. Ispirati ai polpi, questi robot morbidi possono girare e superare ostacoli che potrebbero non essere possibili per robot metallici rigidi e affilati come quelli raffigurati in "Terminator" o "Star Wars".
Sorprendentemente, Octobot è più economico da produrre,di un latte, e costa solo 5 centesimi per rifornirlo. Si può immaginare che centinaia di robot morbidi economici vengano inviati per indagare sulla scena, superare ostacoli e colli di bottiglia per aiutare nelle operazioni di soccorso.
“L'obiettivo principale della robotica morbida non è crearemacchine ultra precise, perché le abbiamo già '', ha affermato l'ingegnere biomedico Jada Gerboni nel suo discorso TED 2018. "E per rendere i robot in grado di resistere a situazioni inaspettate nel mondo reale."
Robot morbidi in medicina
I robot morbidi possono essere utilizzati come filestrumenti chirurgici e medici (in particolare endoscopi). Il loro vantaggio è che si muovono attraverso le strutture del corpo più facilmente rispetto agli strumenti tradizionali. Ciò fornisce ai medici un'immagine più chiara dell'area del corpo del paziente che desiderano esaminare.
L'abbigliamento robotico completamente morbido che può aiutare le persone a muoversi è un passo più vicino alla realtà con lo sviluppo di un nuovo sistema di alimentazione flessibile e leggero per la robotica morbida.
Scoperta fatta da un team di BristolUniversità, potrebbe aprire la strada a dispositivi di assistenza indossabili per le persone con disabilità e per coloro che soffrono di degenerazione muscolare legata all’età. Lo studio è stato pubblicato oggi inScienza robotica.
 Nuova décolleté sottile e leggera delle dimensioni di una carta di credito. Credito: Tim Helps, Università di Bristol.
Nuova décolleté sottile e leggera delle dimensioni di una carta di credito. Credito: Tim Helps, Università di Bristol.
I robot morbidi sono realizzati con materiali flessibili,che può allungarsi e torcersi. Questi materiali possono essere utilizzati per creare muscoli artificiali che si contraggono quando l'aria viene pompata al loro interno. La morbidezza di questi muscoli consente l'uso di indumenti di supporto. Tuttavia, fino ad ora, questi muscoli artificiali pneumatici sono stati azionati da pompe elettromagnetiche convenzionali (azionate da motore), che sono ingombranti, rumorose, complesse e costose.
Ricercatori presso Bristol SoftLabe il Bristol Robotics Laboratory, guidato dal professore di robotica Jonathan Rossiter, hanno dimostrato con successo una nuova pompa elettropneumatica che è morbida, flessibile, poco costosa e facile da produrre.
Nell'articolo, il team descrive come il nuovo softUna pompa delle dimensioni di una carta di credito può guidare muscoli artificiali con una vescica d'aria e pompare fluidi. Il team sta anche delineando i prossimi passi per trasformare in realtà l'abbigliamento potente.
Allo stesso modo, polimeri di titanio a base di carboniopuò essere utilizzato in combinazione con polimeri sintetici per creare muscoli artificiali ultrasottili. Questa tecnologia è stata dimostrata in riproduzioni artistiche di farfalle danzanti, foglie svolazzanti e fiori che sbocciano presso il Korea Advanced Institute of Science and Technology.
Come funzionano i robot soft?
Robot morbidi appositamente progettati perimitazioni della vita, devono spesso essere sottoposte a stress ciclico durante lo spostamento o lo svolgimento di qualsiasi altra attività. Ad esempio, nel caso del robot tipo lampreda o seppia descritto sopra, richiederebbe l'elettrolisi dell'acqua e l'accensione del gas per muoversi, con conseguente rapida espansione per spingere il robot in avanti. Questa espansione e contrazione ripetitiva ed esplosiva creerà un carico ciclico intenso sul materiale polimerico selezionato. Un robot sott'acqua in Europa sarebbe quasi impossibile da riparare o sostituire, quindi è necessario fare attenzione a selezionare un materiale e un design che riducano al minimo il verificarsi e la propagazione di cricche da fatica. In particolare, dovrebbe essere scelto un materiale con un limite di resistenza o una frequenza di ampiezza della sollecitazione al di sopra della quale la caratteristica di fatica del polimero non è più dipendente dalla frequenza.
Poiché i robot morbidi sono fatti di softmateriali, gli effetti della temperatura devono essere presi in considerazione. Lo stress di snervamento del materiale tende a diminuire con la temperatura e nei materiali polimerici questo effetto è ancora più pronunciato. A temperature ambiente e più elevate, lunghe catene in molti polimeri possono allungarsi e scorrere l'una sull'altra, prevenendo la concentrazione di sollecitazioni locali in un'area e rendendo il materiale plastico. Ma la maggior parte dei polimeri subisce una temperatura di transizione da duttile a fragile al di sotto della quale non c'è abbastanza energia termica perché le catene lunghe reagiscano in questo modo duttile, e la distruzione è molto più probabile. Si ritiene che la tendenza dei materiali polimerici a diventare fragili a temperature più basse sia la causa del disastro dello shuttle Challenger e dovrebbe essere presa molto sul serio, soprattutto per i robot morbidi che verranno introdotti in medicina. La temperatura di transizione da duttile a fragile non deve essere quella che può essere considerata "fredda" ed è infatti una caratteristica del materiale stesso, a seconda della sua cristallinità, tenacità, dimensione del gruppo laterale (nel caso dei polimeri) e altri fattori.
Svantaggi della tecnologia
I robot morbidi non sono privi di inconvenienti.Nello specifico, gli scienziati hanno scoperto che gli attuatori fluidi, i dispositivi che animano effettivamente i robot, sono lenti ad accendersi a causa dell'enorme quantità di fluido necessaria per il movimento o perché il loro flusso è rallentato da varie strutture all'interno del dispositivo (come tubi e valvole). ). .
Tuttavia, i ricercatori di Harvard si stanno sviluppandosoluzione alternativa. Notando che la flessione di tali giocattoli rilascia molta energia, progettano attuatori con due coperture scorrevoli, una dentro l'altra. Quando il cappuccio esterno è gonfiato, la pressione aumenta sul cappuccio interno. Quando si piega, il rilascio di energia mette in movimento il dispositivo.
I robot morbidi hanno questo potenzialesi estende a Marte e ritorno, e senza dubbio diventeranno una parte importante della società nei prossimi anni. Le loro capacità sono limitate solo dall'immaginazione umana.
Robot morbidi e umani
I robot soft-body offrono l'opportunità perinterazioni sociali e tattili tra esseri umani e robot, che richiedono un'attenta considerazione della possibilità di attaccamenti emotivi inappropriati e comportamenti personali e socialmente distruttivi degli utenti. Le questioni etiche relative all'interazione uomo-robot e il modo in cui dovrebbero contribuire alla progettazione della soft robotics nel contesto dell'interazione sociale sono discusse in un articolo per la rivista Soft Robotics.
Thomas Arnold e Matthias Schoitz, Tufts University,Medford, Massachusetts, è coautore di un articolo intitolato "The Tactile Ethics of Soft Robotics: Intelligent Design for Human-Robot Interaction". Esplorano una vasta gamma di argomenti, inclusa la capacità dei robot morbidi di toccare e interagire con il loro ambiente, i potenziali rischi di formare connessioni emotive umane unidirezionali con i robot e per cosa dovrebbero essere progettati i robot sociali. Per illustrare alcune delle questioni etiche associate alla robotica morbida e ai potenziali rischi per la società, gli autori discutono l'esempio dei robot sessuali.
Arnold e Schoitz suggeriscono tre comuniil principio dello sviluppo della robotica morbida nel contesto di una persona sociale e di un robot. Incoraggiano la comunità della robotica morbida ad affrontare queste questioni etiche come un modo per migliorare la qualità e l'efficienza dell'interazione uomo-robot. “La tecnologia dei soft robot ci porterà presto macchine che interagiscono direttamente con gli esseri umani; è importante che iniziamo a pensare all'impatto che possono avere sulle situazioni sociali. Questo documento delinea alcune delle questioni chiave e fornisce una guida eccellente per una discussione seria sulla relazione uomo-robot ", conclude Barry A. Trimmer, Ph.D., che gestisce il Laboratorio di Neuromeccanica e Dispositivi Biomimetici presso la Tufts University di Medford, Massachusetts .
Leggi anche
È stata creata la prima mappa accurata del mondo. Cosa c'è di sbagliato in tutti gli altri?
Guarda le foto di Hubble delle nebulose planetarie.
I fisici hanno creato un analogo di un buco nero e hanno confermato la teoria di Hawking. Dove porta?