Il motore di un aereo è un labirinto di tubi tortuosi e rotanti che trasportano liquidi e gas
La loro invenzione è la pioggia meccanicavermi con "muscoli" costituiti da attuatori in elastomero dielettrico e "gambe" realizzate in compositi in fibra di carbonio. Lo sviluppo è descritto in dettaglio in un articolo pubblicato sulla rivista peer-reviewed Science Robotics.
Metodi esistenti per il controllo dell'aviazioneI motori richiedono molto tempo e richiedono ingegneri altamente qualificati. Ci auguriamo che i robot svolgano questo tipo di lavoro per risparmiare tempo e fatica.
Huichang Zhao, uno dei coautori dello studio, in un'intervista con IE
Questo non è il primo robot progettato per l'ispezionetubi su scala centimetrica e millimetrica. Altri progetti utilizzano ruote o altri mezzi per muoversi in spazi chiusi. Ma queste soluzioni non sono sempre pratiche, dicono gli autori del nuovo lavoro. Uno dei motivi è che le condizioni in condutture diverse possono variare notevolmente, anche all'interno dello stesso motore. Questi progetti potrebbero anche avere difficoltà a svolgere due compiti ugualmente importanti per questo tipo di robot: locomozione e ispezione.
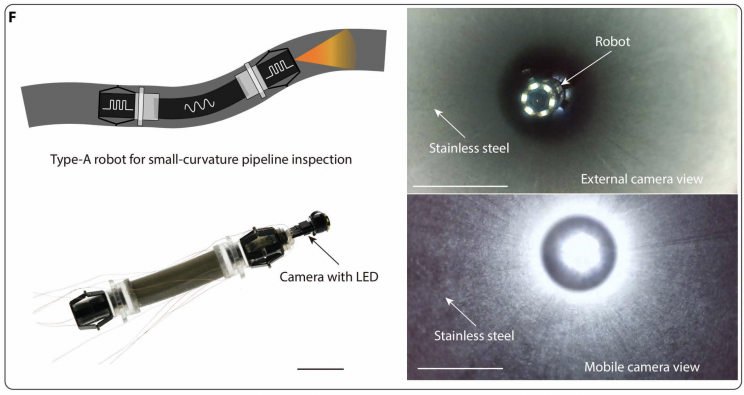 Immagini di un robot con una telecamera frontale e un robot che rileva l'ambiente in un tubo di acciaio inossidabile.
Immagini di un robot con una telecamera frontale e un robot che rileva l'ambiente in un tubo di acciaio inossidabile.
Fonte
Per mitigare queste limitazioni, gli ingegneriispirati ai robot ad azionamento pneumatico che utilizzano l'aria compressa per muoversi lungo tutta la loro lunghezza, strisciando come vermi. Sono più facili da sigillare e restringere a piccole dimensioni perché non hanno sporgenze complesse come ruote o gambe. Tuttavia, questi i robot tendono ad essere lenti.
Il nuovo design gli consente di muoversicompletamente diverso. Al posto dell'aria compressa, il dispositivo simile a un lombrico utilizza cariche elettriche per muoversi a onde attraverso il tubo.
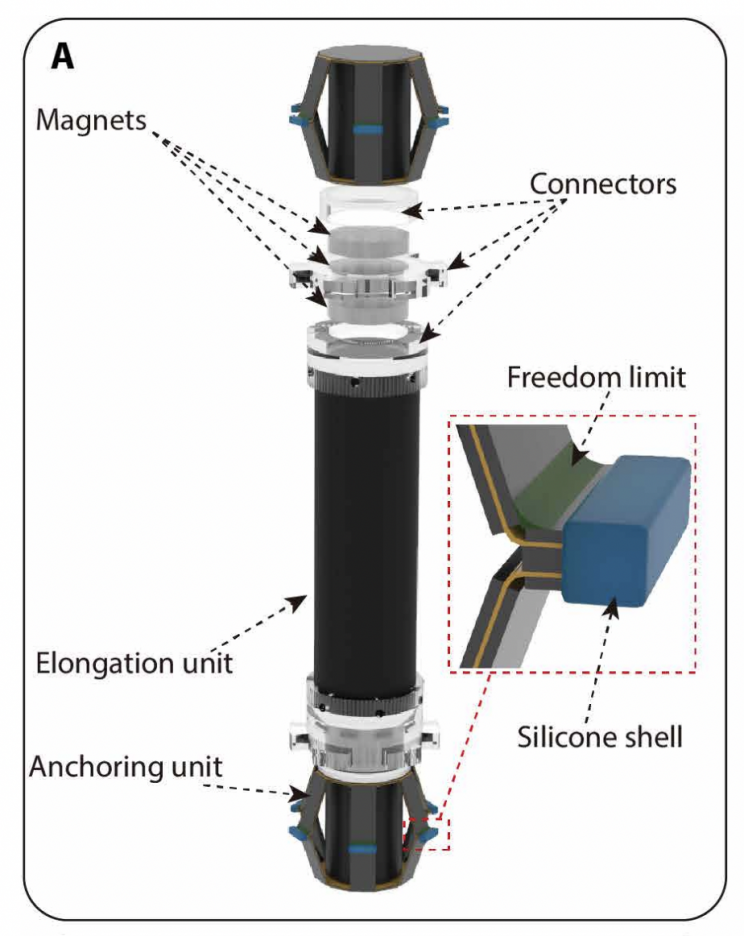 Rappresentazione schematica del robot.
Rappresentazione schematica del robot.
Fonte
La tecnologia chiave del robot sono i muscoli artificiali,noti anche come attuatori morbidi o attuatori in elastomero dielettrico. Sono potenti e abbastanza piccoli da far muovere rapidamente il robot in un tubo. Le cariche fanno contrarre rapidamente gli attuatori, consentendo alla macchina lunga 47 mm di muoversi alla velocità di una lunghezza del corpo al secondo. Il robot è costituito da segmenti che possono essere agganciati insieme utilizzando magneti, consentendo all'operatore di personalizzare l'esatto progettazione in base alle specifiche della linea da ispezionare.
"Possiamo mettere un tale robot in un trasportatore di motori aeronautici e farlo muovere per tutta la sua lunghezza, inviando immagini lungo il percorso", concludono gli scienziati.
Leggi di più
La gravità e la materia oscura non esistono: la cosa principale del nuovo lavoro dei fisici
Qualcosa di strano sta accadendo nell'Universo: come spiegare le incongruenze nella costante di Hubble
Perché vogliono davvero cancellare il sistema educativo di Bologna in Russia