Chi sono i robot?
Alcuni anni fa, su Reddit è apparsa una cosa interessante: gli scienziati hanno descritto la complessità
La robotica è una sinergia applicatacampo di attività. Si compone di programmazione, meccatronica e cibernetica. La meccatronica è qualcosa che interagisce con il mondo reale. E la cibernetica è una scienza multi-link, che comprende, prima di tutto, la gestione dei programmi creati.
Cos'è un robot?15 anni fa, molti avrebbero detto che si tratta di un braccio robotico che lavora in una fabbrica e fa saldatura o verniciatura. Un'altra risposta popolare è il robot Android del mondo del cinema. Ma un carrello in movimento o un veicolo senza pilota è un robot? Sì, questa è anche una delle aree della robotica. Anche gli aerei sono robot, alcuni degli ultimi sviluppi includono tecnologie intelligenti e sono, di fatto, robot autonomi.
 Il carrello mobile è anche un robot
Il carrello mobile è anche un robot
C'è anche un'area della robotica come il camporobotica - "robotica mobile". Ciò include tutti i robot che si muovono in un campo, in un edificio o sott'acqua. L'applicazione più interessante, a mio avviso, è l'agricoltura.
Storia degli aerei
La storia degli aerei inizia nel passatosecolo. Prima di allora, volavano solo palloncini senza motore ed era difficile chiamarli robot. All'inizio del secolo scorso funzionavano due tipi di aeromobili: dirigibili e aeroplani. Il primo volo controllato fu effettuato dai fratelli Wright. Inoltre, il primo pilota automatico è apparso abbastanza rapidamente, quasi 10 anni dopo, ha contribuito a stabilizzare il volo.
L'attuale direzione della robotica è correlatasviluppo e disponibilità di nuovi autopiloti aperti come PixHawk (PixHawk è hardware aperto per controller, droni e altri UAV. Viene utilizzato per scopi accademici, amatoriali e professionali). Un esempio dell'arrivo dei droni nella vita di ogni persona è la consegna della pizza da parte dell'azienda Dodo Pizza insieme a Copt Express - questo è successo nel 2014.
 Storia degli aerei
Storia degli aerei
Come viene controllato il drone
Gli aerei moderni ne usano unodei tre principi per creare portanza: aerostatico, jet o aerodinamico. Il principio aerodinamico del volo e la creazione di portanza (lancio di parte dell'aria) può essere attuato sia per il movimento dell'intero apparato, dotato di una superficie di appoggio fissa (ala), sia per il movimento delle singole parti di appoggio dell'apparato (rotore principale, ventola) rispetto all'aria.
 Come volano i dispositivi
Come volano i dispositivi
Il drone ha un'elica che crea portanza.Essendosi sollevato da terra, il dispositivo inizia a muovere l'elica più velocemente e si solleva. Ma la forza d'azione è uguale alla forza di reazione. Quando l'elica ruota, viene creato un momento nell'altra direzione: questo è il design di elicotteri ed elicotteri. Se l'elicottero ha un'elica, non sarà stabile. Pertanto, il dispositivo utilizza uno schema a due rotori o un rotore di coda.
Il quadrirotore ha un design molto semplice -Di solito ha quattro viti, due delle quali ruotano in una direzione e due nell'altra direzione. Se l'utente ha bisogno di andare avanti, alcune eliche girano più lentamente mentre altre girano più velocemente. E se l'utente vuole girare, alcune viti posizionate in diagonale accelerano, mentre altre rallentano.
 Come vola un quadrirotore
Come vola un quadrirotore
I movimenti dell'elicottero negli angoli sono legati al movimento lungocoordinate. Se il pilota vuole andare avanti, dobbiamo prima inclinare il drone in avanti e poi, mentre il dispositivo elettrico si spinge in avanti, stabilizzarlo nel punto in cui vogliamo rimanere.
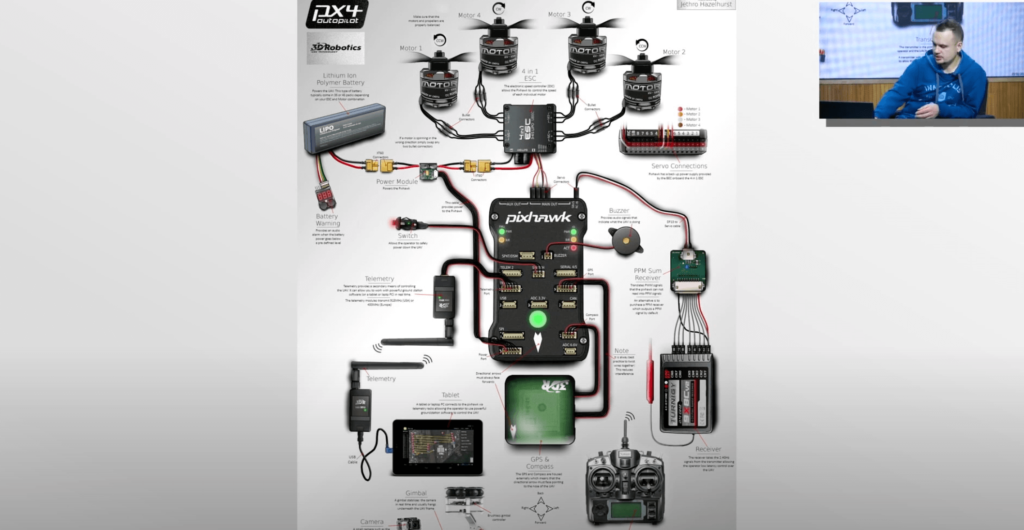
Questo è un diagramma di uno degli autopiloti più popolari,sulla base dei quali possono essere realizzati nuovi dispositivi. Si collega a tutti i motori e sensori. Inoltre, i motori sono dotati di una propria centralina, il regolatore ESC - Electronic Speed Controller, che controlla la velocità del motore.
Tra i sensori, c'è il GPS in modo che il drone possa farlolavorare all'aperto, volare verso i punti e stabilizzare la posizione. Ma all'interno dell'autopilota stesso c'è anche un IMU, un modulo sensore inerziale che gli consente di determinare gli angoli di assetto. C'è anche un canale di comunicazione, una stazione di controllo a terra e una batteria.
 dispositivo UAV
dispositivo UAV
Come accennato in precedenza, c'è un livellocontrollo del motore: noi, senza esitazione, possiamo impostare la velocità di rotazione. Il resto dei livelli funziona secondo lo stesso principio: il prossimo è il controllo dell'orientamento.
Ma prima dobbiamo controllare la velocità di rotazione- Gli elicotteri FPV volano a questo livello (dispositivi che consentono di guardare l'immagine dalla telecamera del drone in tempo reale dalla prima persona (FPV - First Person View). Piloti esperti impostano la velocità di rotazione e sterzano costantemente con il joystick. Il prossimo la fase è quando l'utente può stabilizzare l'angolo, ma il drone si muoverà comunque. Il prossimo è il controllo della velocità e il più alto è il controllo della posizione, le manovre per spostarsi in un punto o spostarsi lungo una determinata traiettoria.
Coloro che vogliono programmare, costruire econtrollare i droni: prestare attenzione al pilota automatico open source PIX4. C'è un'intera comunità intorno alla robotica aerea (ROS - sistema operativo robotico, o robotica aperta), ci sono simulatori per droni. Pertanto, molti esperimenti possono essere eseguiti nel simulatore senza avere il drone stesso.
Fasi di sviluppo dei droni
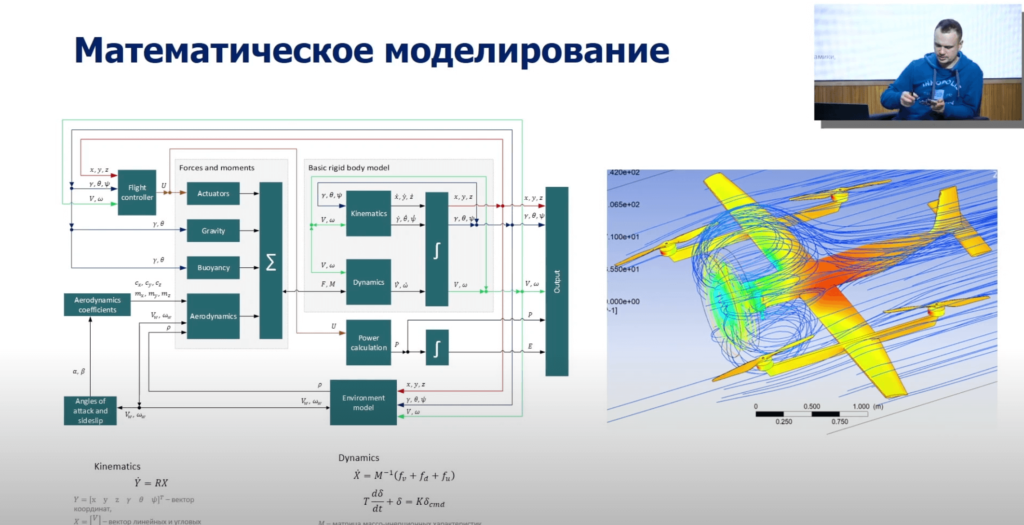
I ricercatori iniziano con un concettomodellazione, quindi devono costruire un modello accurato dell'apparato. Senza entrare nella formula, un modello di elicottero è essenzialmente un modello a corpo rigido. Questa è la seconda legge di Newton estesa ai sistemi di particelle. Ha movimento traslatorio e rotatorio, ci sono cinematica e dinamica del movimento e per descrivere il modello di un dispositivo specifico dobbiamo aggiungere qui l'equazione delle forze che agiscono su un drone specifico.
 Come vengono modellati gli UAV
Come vengono modellati gli UAV
Il prossimo passo è sviluppare il sistemagestione. Se andiamo nel modo classico: prima scopriamo il modello matematico esatto e, sulla base, sintetizziamo già l'algoritmo di controllo o nuove formule. Tutti i livelli possono essere inclusi nel sistema di controllo: pianificazione del movimento, percezione dell'ambiente, valutazione dello stato tramite sensori. Gli algoritmi ci consentono di perfezionare le nostre coordinate e dati.
 Sistema di controllo dei droni
Sistema di controllo dei droni
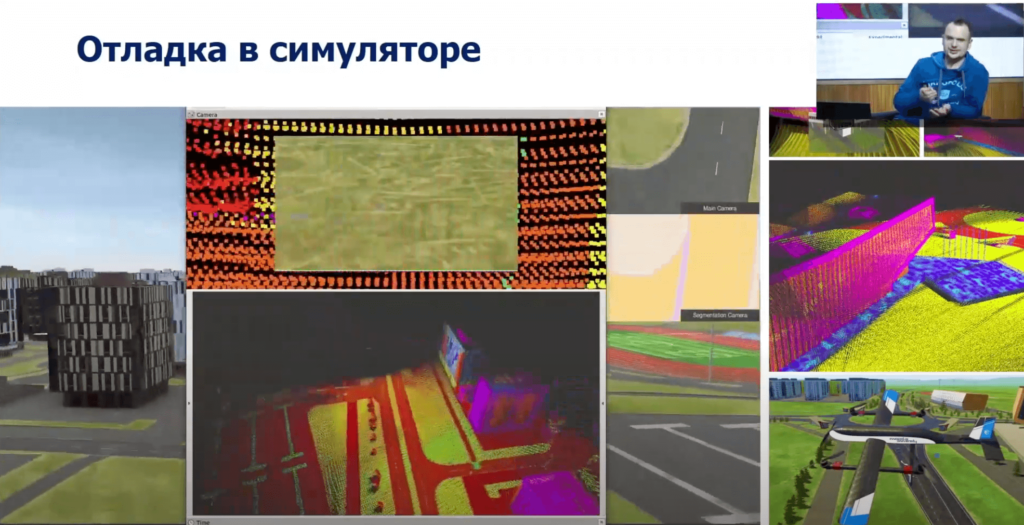
Quando esiste un algoritmo di controllo, può essere immediatoapplicare, ma farlo è piuttosto costoso. I dispositivi si bloccano al minimo errore: è necessario tenerne conto ed eseguire i backup. I simulatori vengono utilizzati per i test.
Di seguito un tour virtuale di Innopolisè un prodotto della nostra università, è disponibile per il download su GitHub. Questo non è solo un componente visivo, ma anche i dati di tutti i sensori del dispositivo. Ha tutti i sensori di posizione, è controllato come un drone e può eseguire il debug di tutti gli algoritmi di controllo.
 Come i droni imparano nella simulazione
Come i droni imparano nella simulazione
Quando viene visualizzato in base all'esperienza con il simulatoremaggiore sicurezza: puoi passare all'implementazione hardware. I suoi componenti sono mostrati qui: la fabbricazione del dispositivo in carbonio e composito, la creazione dell'elettronica, il posizionamento dei motori, il loro fissaggio.
I test non iniziano per strada:Innanzitutto, i dispositivi vengono testati su una sospensione o su un supporto speciale. Possono essere utilizzati per eseguire il debug di elementi del funzionamento di un veicolo aereo senza pilota. Ad esempio, qui viene mostrato un aereo con decollo e atterraggio verticale: questo è un ibrido tra un elicottero e un aereo; nel video puoi vedere come affronta i disturbi esterni e mantiene un angolo. Sulla destra c'è un esperimento piuttosto folle in cui accendi cinque motori contemporaneamente e vedi come il sistema di controllo lo gestisce.
 Come sono costruiti i droni
Come sono costruiti i droni
Dopo i test, passano ai voli -piccoli decolli a basse velocità, movimento controllato con un pilota che può prendere il controllo. L'accordo finale è un volo completamente senza pilota.
Il dispositivo decolla verticalmente -"come un elicottero", quindi il motore principale si accende, il drone accelera, passa alla modalità aereo e sviluppa una velocità sufficiente affinché l'ala funzioni. Quindi le eliche di contorno vengono spente e vola come un aeroplano: il processo di atterraggio viene eseguito in ordine inverso.
Cosa sta succedendo con i droni
Uno dei compiti più moderniscienziati: aggirare gli ostacoli in volo. Alcuni droni sanno già come farlo, ma il compito è un po' più ampio: è necessario insegnare ai dispositivi a muoversi il più rapidamente possibile in un ambiente con ostacoli. E c'è ancora spazio per impegnarsi e migliorare gli algoritmi.
Un altro esempio di tali test è un volo versoforesta. C'è un approccio molto interessante: qui non vengono utilizzati solo nuovi algoritmi, ma anche sensori: una telecamera per eventi. Si tratta di una telecamera ad altissima frequenza che trasmette la differenza tra i fotogrammi in ogni unità di tempo: questo permette di controllare e reagire velocemente agli ostacoli.
Nel campo della pianificazione del movimento dei droni,concorrenza: chi lo farà più velocemente. Il compito è mappare un'area sconosciuta, costruirne la rappresentazione tridimensionale, trovare oggetti su di essa. Abbiamo volato all'università, ma abbiamo anche risolto il problema del ritrovamento degli oggetti. I nostri risultati sono stati persino migliori degli algoritmi pubblicati noti.
Ci sono gare nella corsa dei droni.Sono realizzati su dispositivi con telecamera, quando il pilota ha gli occhiali e controlla il drone per volare attraverso il cancello il più rapidamente possibile. Un evento piuttosto spettacolare, in cui lo stesso compito deve essere eseguito in modalità automatica. Sfortunatamente, finora il computer è riuscito a sconfiggere una persona solo negli scacchi e il robot drone non è riuscito a sorpassare un pilota umano, sebbene i progressi siano già abbastanza seri. Un drone con l'aiuto di un algoritmo di visione artificiale può eseguire tali compiti, il lavoro è solo quello di aumentare la velocità.
Un'altra competizione è Microsoft Games ofdroni, si svolge in un simulatore. Nella stessa area si tiene una delle più famose competizioni leader in Arabia Saudita. I partecipanti vengono reclutati con tre anni di anticipo.
I dispositivi senza pilota vengono utilizzati per gli spettacoli con droni- Questi sono eventi spettacolari che oggi sono diventati un sostituto dei fuochi d'artificio. Ma questo non è l'unico utilizzo di gruppo: possono ispezionare un'area più ampia.
Dove si applica
In modo che non sembri esclusivamente scientificosviluppo, di seguito è riportata una demo del drone Skydio. Ora questo è il dispositivo più avanzato in termini di autonomia. Questo è un esempio di come le moderne tecnologie - cartografia, prevenzione degli ostacoli, pianificazione del traffico siano utilizzate insieme in un prodotto già disponibile per l'utente.
Un'altra direzione sono i nuovi designaereo. Uno di questi sono i droni pieghevoli. Uno di questi dispositivi può volare in spazi ristretti per essere ispezionato dopo un incidente. Un altro esempio è un drone che può svolgersi. Ad esempio, può volare fuori da uno stretto tubo pneumatico e poi volare come al solito.
Abbiamo anche un progetto in quest'area - questo èTensodrone molle. Questo è il primo drone softshell che vola. Il piacere è che puoi lasciarlo cadere e rimarrà intatto. Inoltre, puoi modificare la lunghezza delle travi, la tensione dei cavi.
Due esempi che prenderanno vitaPresto. Innanzitutto, la consegna tramite droni. Ora esiste un'implementazione molto interessante in cui combiniamo un terminale per pacchi e una stazione di atterraggio per droni: in questo caso non dobbiamo preoccuparci di quando arriverà il drone, dove atterrerà, in modo da poterlo raggiungere tempo e ritirare il carico prima che venga rubato. Il secondo esempio è un taxi volante. Questa è l’area di sviluppo più entusiasmante e esistono già prototipi funzionanti. Ma questo avverrà solo nel prossimo decennio.
Quali sviluppi nel campo dei taxi volanti sono apparsi negli ultimi 6 anni:
- L'azienda "Hover" ha presentato un dispositivo conmotore elettrico silenzioso e dimensioni compatte - come un'auto. Decolla a un'altezza di 150 me atterra in un parcheggio standard. Il drone è progettato per due passeggeri, il carico utile massimo è di 300 kg e la velocità è di 200 km/h.
— Nel 2016, la società russa Hoversurfha mostrato un hoverbike che puoi portare con te e decollare in qualsiasi momento da un normale parcheggio cittadino. Raggiunge velocità fino a 100 km/h e l'altezza di sollevamento è forzatamente limitata a 5 metri per motivi di sicurezza.
— Nel 2018, sviluppato da Airbus PassengerL'aereo Alpha One VTOL è salito a un'altezza di 5 metri ed è rimasto in aria per 53 secondi. L'utente potrà chiamare l'UAV tramite l'applicazione e spostarsi da un punto all'altro sia all'interno della città che oltre.
— Nel 2020 è stato realizzato il taxi aereo CityAirbusprimo volo libero. I test si sono svolti nella periferia di Parigi, la città dell'Ile-de-France, il velivolo CityAirbus è in grado di muoversi a velocità fino a 120 km/h per una distanza massima di 30 km. Il peso del taxi volante è superiore a 2,2 tonnellate, CityAirbus è dotato di tre sedili passeggeri e un posto guida.
- Nel 2022, la startup cinese Pantuo Aviation ha introdotto il T1, un dimostratore di taxi volanti con condotto dell'aria. Volerà a velocità di oltre 300 km/h e avrà un'autonomia di 250 km.
Leggi di più:
La sonda spaziale ha volato a 200 km da Mercurio. Guarda cosa ha visto
Gli scienziati scoprono come le vitamine influiscono sull'incidenza del cancro
Il casco cinese per la lettura della mente suona l'allarme quando una persona vede contenuti porno