מהנדסים מאוניברסיטת קיימברידג' פיתחו יד רובוטית רכה שהודפסה עליה
החוקרים השתמשו במודפסיד אנתרופומורפית שהושתלה בחיישני מישוש במדפסת תלת מימד כדי שהיד תוכל "לחוש" במה היא נוגעת. היד הייתה מסוגלת רק לתנועה פסיבית על בסיס פרק כף היד. "היתרון הגדול של עיצוב זה הוא טווח התנועה שאנו יכולים לקבל מבלי להשתמש באף מפעיל", אומרים המחברים.
אימון זרוע רובוטית "פאסיבית". וידאו: אוניברסיטת קיימברידג'
מדענים ערכו יותר מ-1,200 בדיקות עם זרוע רובוט,צופה ביכולת שלה לתפוס חפצים קטנים מבלי להפיל אותם. בתחילה, הרובוט אומן באמצעות כדורי פלסטיק קטנים מודפסים בתלת מימד ותפס אותם באמצעות פעולות שנקבעו מראש שנגזרו מהדגמות אנושיות.
הרובוט השתמש בניסוי וטעייה כדיגלה איזו לכידה תצליח. לאחר שסיים את אימון הכדור שלו, הוא ניסה לתפוס חפצים שונים, כולל אפרסק, עכבר מחשב וגליל של ניילון בועות. בבדיקות אלו, היד הצליחה לתפוס בהצלחה 11 מתוך 14 חפצים.
לכידת חפצים בגדלים, צורות ומרקמים שונים- משימה פשוטה לאדם, אך קשה לרובוט. רוב הרובוטים המתקדמים של היום אינם מסוגלים לבצע משימות מניפולטיביות שילדים קטנים יכולים להתמודד בקלות. למשל, אנשים יודעים אינסטינקטיבית כמה כוח להפעיל כדי להרים ביצה, אבל עבור רובוט זו בעיה: לא חזק מספיק יגרום לאובייקט ליפול, חזק מדי ישבור את הביצה.
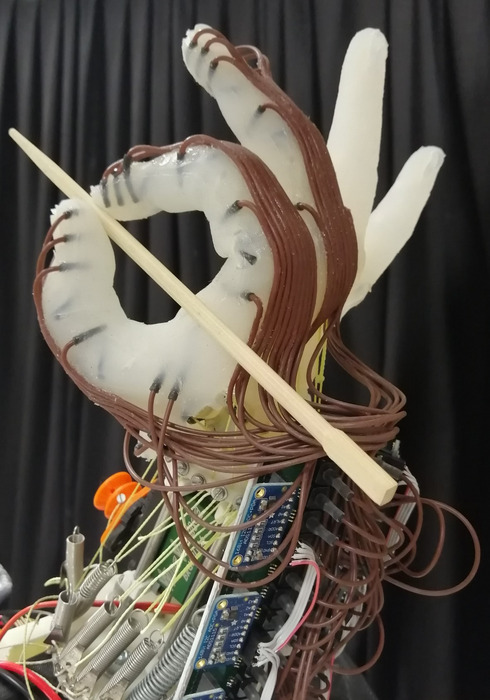 אב טיפוס תפס רובוטי. תמונה: אוניברסיטת קיימברידג'
אב טיפוס תפס רובוטי. תמונה: אוניברסיטת קיימברידג'
טכנולוגיה מתוחכמת עם אצבעות ממונעותדורש כמות משמעותית של אנרגיה ומספר רב של מפעילים מורכבים ויקרים עבור כל מפרק. האחיזה הפסיבית המוצעת על ידי המהנדסים הופכת את הרובוט להרבה יותר קל לשליטה והרבה יותר חסכוני באנרגיה. החוקרים מאמינים שהעיצוב הניתן להתאמה שלהם יכול לשמש לפיתוח רובוטיקה בעלות נמוכה המסוגלת לתנועות טבעיות יותר.
קרא עוד:
תראו את המפה ברזולוציה הגבוהה ביותר של מאדים: 110,000 פריימים ו-5.7 טריליון פיקסלים
"ים" של קווארקים בתוך פרוטון אחד: ממה מורכב חלקיק יסודי
תמונה חדשה של האבל תמהה מדענים
על הכריכה: אב טיפוס תפס רובוטי. תמונה: אוניברסיטת קיימברידג'