חוקרים מהמכון הטכנולוגי האיטלקי הציגו אב טיפוס של רובוט בעל שלוש רגליים
הפלטפורמה הרובוטית MARM מורכבת מגוף מרכזי, שלוש גפיים ומכשיר עגינה מיוחד. האחרון משמש לטעינת המכשיר ולהחלפת נתונים. בעת יצירת רובוט, מדענים סיפקו את האפשרות לעבוד הן בנוכחות כוח הכבידה והן במיקרו-כבידה.
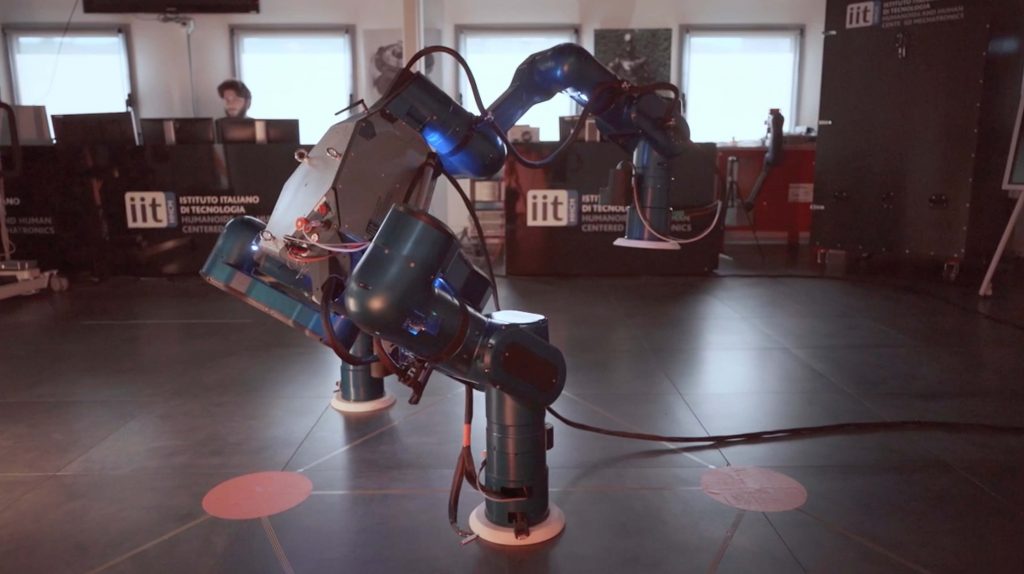
רובוט MARM. וידאו: IIT
רובוט MARM יכול להשתמש בשלושה גפיים כדיתנועה על ידי אחיזה של חיבורים סטנדרטיים על משטחי תחנות וזחילה מעליהם. הוא יכול גם להרכיב ולמקם רכיבי מכשירים שונים, כגון הזזה והתקנת לוחות משושה מודולריים ברוחב 1.2 מטר המשמשים ב-ISS, ותפעול תוספות מסלוליות.

רובוט MARM. תמונות: IIT
תצורת שלושה איברים - בסיסיההבדל בין הרובוט החדש לפיתוחים קודמים. זה, לדברי מהנדסים, מספק גמישות רבה יותר בתפעול המכשיר. לדוגמה, הוא יכול להשתמש בשתי "ידיים" כדי לעבוד, להחזיק במשטח בעזרת היד הנותרת.
חוקרים מציעים להשתמש ב-MARM כדילאסוף סחורה מהמחסן, להעביר אותם למקום הנכון, לאסוף ולהניח. אב הטיפוס ייבדק במיקרו-כבידה תוך התחשבות בתרחיש זה, ולאחר מכן תיווצר גרסת עבודה שתשלח ל-ISS.
קרא עוד:
מדענים מאזור הפרמפרוסט: איך הם מפתחים בגדים חכמים וחיסון סרטן
שני כוכבי לכת נמצאו לא הרחק מכדור הארץ. אולי הם מאוכלסים
מדענים גילו מי הרוויח ממותו של דינוזאורים