גוגל ערכה מחקר והקימה אלגוריתמים שיזרזו ויפשטו את התהליך
מה עשה
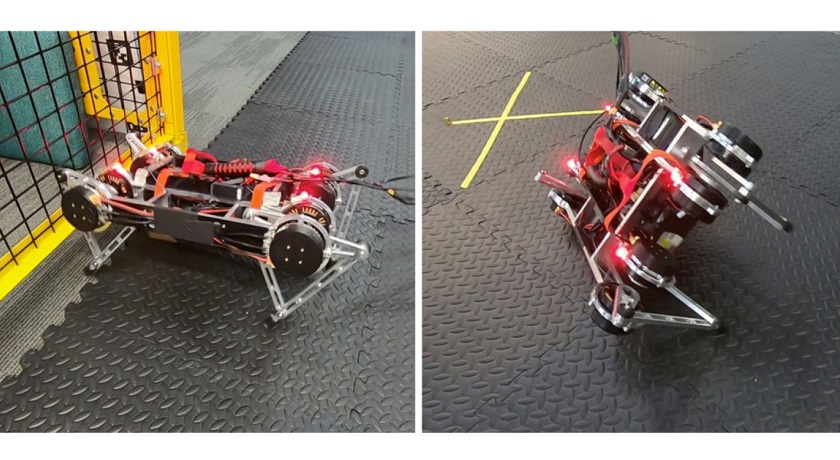
חוקרים ב-Google Robotics יצרורובוט בעל ארבע רגליים שתוך כמה שעות למד ללכת הלוך ושוב ולהסתובב בכוחות עצמו. בעבר, אלגוריתמים נבדקו על רובוט וירטואלי בסביבה וירטואלית, מה שעזר למנוע נזק לרובוט האמיתי. אבל התהליך של חיקוי משטחים שונים היה עתיר מדי עבודה.
</ img>
חוקרים החלו הכשרה מהעולם האמיתי והרובוט הצליח להסתגל במהירות לשטח לא אחיד. עם זאת, התערבות אנושית עדיין הייתה הכרחית והחוקרים נאלצו להתערב בלמידה אנושית. אז הם הגבילו את שטח הפנים ואילצו את הרובוט ללמוד מספר תמרונים בבת אחת. אם הרובוט, לאחר שהגיע לקצה הטריטוריה שלו, ילך קדימה, הוא יבין שיש מכשול לפניו ויתחיל ללכת אחורה, ורוכש מיומנות חדשה.
עם מערכת זו, הרובוט הצליח להשתמש בניסוי וטעייה כדי ללמוד בסופו של דבר כיצד לנוע בעצמו על פני משטחים שונים.
עם זאת, למחקר יש מגבלות:הטכנולוגיה עדיין לא אוניברסלית ומתאימה לכל סוגי הרובוטים. אבל החוקרים מקווים להתאים את האלגוריתמים החדשים לרובוטים שונים. אם הם יצליחו, זה יכול לקדם מאוד את הרובוטיקה.