לאחרונה, מדענים ערכו מחקר שמטרתו לשכפל את היכולת האנושית לקבוע
המאמר מדגיש את היתרונות של פיתוח רובוטים שיכולים לקיים אינטראקציה עם הסביבה באמצעות מגע, ולא רק ראייה ועיבוד קול.
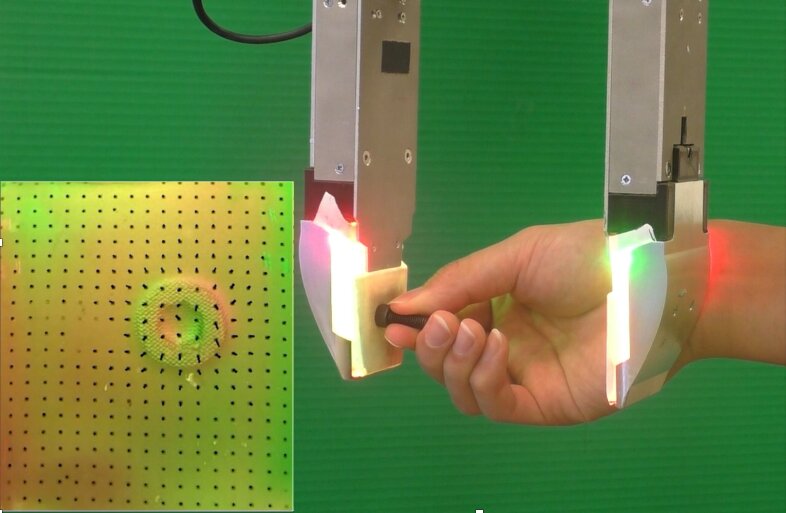
מטרת העבודה שלנו הייתה להדגים זאת עםעם חישה מישוש ברזולוציה גבוהה, ניתן למקם אובייקטים מוכרים במדויק אפילו מהמגע הראשון. זוהי התקדמות חשובה בהשוואה לעבודה קודמת על לוקליזציה מישוש, מכיוון שאיננו מסתמכים על אופנים אחרים של תפיסה חיצונית (למשל, ראייה) או נתונים מישוש שנאספו בעבר הקשורים לאובייקטים שעברו מניפולציה.
מריה באוזה, אחת החוקרים
הטכניקה החדשה לומדת מסימולציה ולא עושה זאתדורש איסוף נתונים נרחב. בתחילה, החוקרים פיתחו מבנה המדמה מגעים בין אובייקט נתון לחיישן מישוש, ובלבד שלרובוט תהיה גישה לנתונים אודות האובייקט איתו הוא מתקשר (למשל, לגבי צורתו התלת מימדית, תכונותיו וכו ').
לאחר מכן, החוקרים השתמשו במודרנישיטות למידת מכונה ללימוד ראייה ממוחשבת ולמידת ייצוג כדי להתאים בין תצפיות מישוש בעולם האמיתי שנאספו על ידי הרובוט למערכת של אנשי קשר שנוצרו בתהליך הסימולציה.
בעיקרו של דבר, השיטה שפיתחה קבוצה זוחוקרים יכולים לדגמן מידע ליצירת קשר פשוט על סמך הצורה התלת מימדית של אובייקט. כתוצאה מכך, אין צורך בנתונים מישוש ראשוניים שנאספו באמצעות מחקר מדוקדק של האובייקט. זה מאפשר לטכניקה ליצור הערכות פוזות עבור אובייקט מהמגע הראשון של חיישני המישוש של הרובוט.
קרא עוד
כדור הארץ יגיע לטמפרטורה קריטית בעוד 20 שנה
הפלה ומדע: מה יקרה לילדים שילדו
צמח שלא מפחד משינויי אקלים קיבל שם. זה מאכיל מיליארד אנשים