חוקרים ממכון המחקר Idiap בשוויץ, האוניברסיטה הסינית של הונג קונג (CUHK) ו
"העבודה האחרונה שלנו היא עבודה משותפתשלוש מעבדות. אנחנו לומדים את הטכניקה הזו כבר כעשר שנים ומעוניינים ליצור רובוטים חכמים שיכולים לבשל אוכל לאנשים", מציינים החוקרים.
הם החליטו להתמקד בסיניתאומנויות קולינריות, במיוחד טיגון עמוק, טכניקה הכוללת טיגון מרכיבים על אש גבוהה, שם יש צורך לערבב אותם כל הזמן. "למרות העובדה שרובוטים כאלה כבר פותחו בשנים האחרונות, יצירת שף רובוט בסביבת מטבח מובנית למחצה היא עדיין משימה אדירה", מציינים המדענים.
הם הוסיפו כי המנגנון החדש שוקלתיאום כבעיה של העברת רצף בין תנועות שתי הידיים ומשתמש במודל המשולב של השנאי ו-GNN לשם כך. לכן, בתהליך אינטראקטיבי מתקנים את תנועת יד שמאל בהתאם למשוב החזותי, והתנועה המתאימה של יד ימין נוצרת על ידי מודל המבנה-שנאי שהוכשר מראש המבוסס על תנועות יד שמאל.
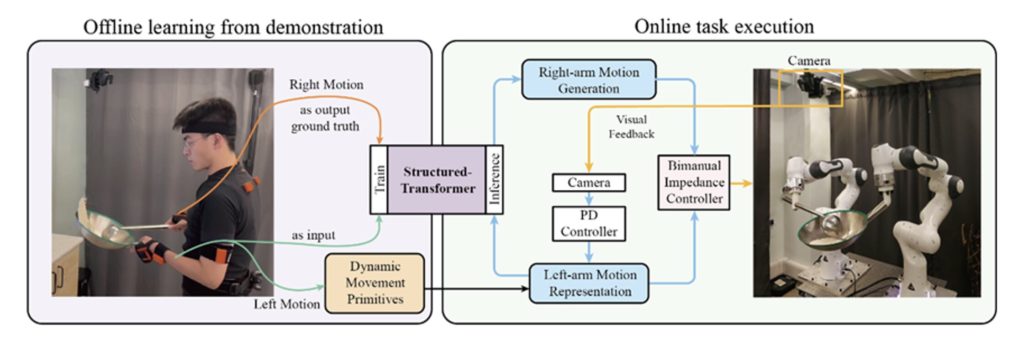
החוקרים דירגו את הביצועים של המודל שלהם כסימולציות, ועל פלטפורמה רובוטית פיזית בשתי ידיים. בבדיקות אלו, המודל אפשר לרובוט לשחזר בהצלחה ובמציאות את התנועות הקשורות לבישול תפוחי אדמה מטוגנים.
בעתיד, המודל שמציגה הקבוצהחוקרים, עשויים לאפשר פיתוח רובוטים המסוגלים לבשל הן בבית והן במקומות ציבוריים. בנוסף, ניתן להשתמש באותה גישה כדי להכשיר רובוטים למשימות אחרות הכוללות שימוש בשתי ידיים וידיים.
"עכשיו נציג מימד גבוה יותרמידע ללימוד התנועות של דמויי אדם בעת עבודה במטבח, למשל, אותות חזותיים ואותות אלקטרומיוגרפיה, מציינים המדענים. "לכן, אנחנו גם מתכננים להציע מערכת מורכבת יותר שתכלול גם את התנועות של המניפולטורים הדו-מנויים וגם את השינוי במצב האובייקט."
קרא עוד
סימולטור קוונטי הראה חלוקה של אלקטרון לחלקים במרחב חד-ממדי
פיזיקאים יצרו לייזר אטומי שיכול לעבוד לנצח
שני כוכבי לכת שנמצאו לא רחוק מכדור הארץ הדומים מאוד לשלנו