מהם רובוטים רכים?
רובוטיקה רכה היא תחום רובוטיקה מיוחד העוסק ב
רובוטיקה רכה תלויה במידה רבה בכיצד אורגניזמים חיים נעים ומסתגלים לסביבתם. בניגוד לרובוטים הבנויים מחומרים קשיחים, רובוטים רכים מספקים גמישות וכושר הסתגלות לביצוע משימות, וכן בטיחות מוגברת בעבודה עם אנשים. מאפיינים אלה מאפשרים להשתמש בו ברפואה ובתעשייה.
רובוטיקה רכה מעצבת בעיקררובוטים העשויים כולה מחומרים רכים. כתוצאה מכך הרובוטים המתקבלים נראים כמו חסרי חוליות כמו תולעים או תמנונים. לדמות תנועה של רובוטים כאלה היא משימה קשה. העובדה היא שעבור תהליכים כאלה יש צורך ליישם את השיטות של מכניקת הרצף. זו הסיבה שרובוטים רכים מכונים לפעמים רובוטים רצפים.
מכניקת הרצף היא ענף של מכניקה, פיזיקת רצף ופיזיקה של חומר מעובה המוקדש לתנועה של מוצקים גזיים, נוזליים ומעוותים, כמו גם אינטראקציות כוח בגופים כאלה.
כלאיים של רובוטים רכים וקשים
כדי לחקור תופעות ביולוגיות, מדענים יוצרים רובוטים רכים בדמותם של אורגניזמים חיים ומבצעים ניסויים שקשה לבצע באורגניזמים אמיתיים.
עם זאת, ישנם רובוטים נוקשים המסוגלים גם לעיוות מתמשך, כמו למשל רובוט הנחש.
קונסטרוקציות רכות יכולות לשמש כחלק מרובוט נוקשה גדול יותר. אפקטורים רכים של רובוטים לאחיזה ותמרון של עצמים מספקים יתרון. העניין הוא שהם לא הורסים חפצים שבירים.
אפשר גם ליצור היברידי רך-קשהרובוטים בעלי מסגרת נוקשה פנימית ואלמנטים רכים חיצוניים. לאלמנטים רכים יכולות להיות פונקציות רבות: הן מנגנוני פעולה הדומים לשרירי בעלי החיים והן חומר ריפוד כדי להבטיח בטיחות במקרה של התנגשות עם בני אדם.
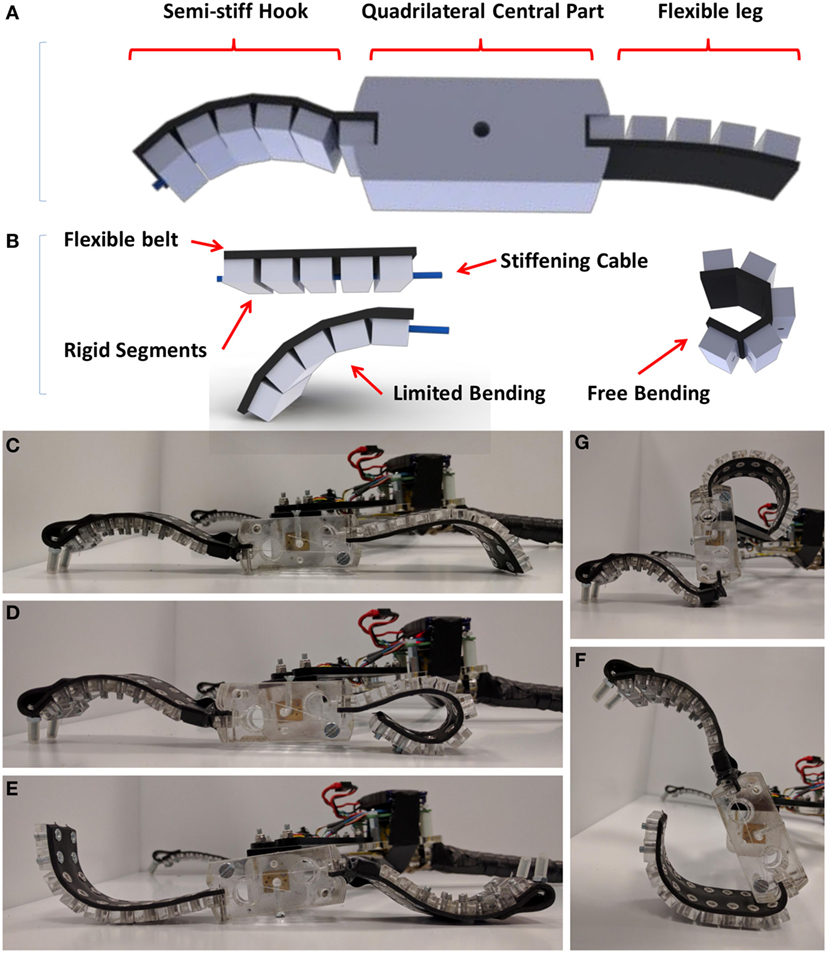 רובוט על גלגלים עם רגליים רכות ויכולת תנועה על הקרקע.
רובוט על גלגלים עם רגליים רכות ויכולת תנועה על הקרקע.
צילום: עלי סדגי, אלסיו מונדיני, עמנואלה דל דוטורה, אנאנד קומאר משרא וברברה מזולאי.
ניתן לכופף רובוטים רכים לכל צורהטופס. הם עשויים מחומר רך מאוד, כולל ננו-חומרים. זה הופך אותם ליותר כמו חלקי גוף אנושיים, כגון שרירים. למעשה, אפשר לומר שהרובוטים האלה כמעט מתעוררים לחיים בעזרת ננו-חומרים.
למרות מחקרים רבים בתחום הרובוטים הרכים, המהנדסים עדיין בתחילת דרכם. עם זאת, מומחים צופים שעד 2024 השוק שלהם יגיע ל-2.16 מיליארד דולר.
במה שונים רובוטים רכים מרובוטים רגילים?
רובוטים ממתכת מוגבלים הרבה יותר. הם נבנו במהירות ובדיוק, מה שהופך אותם לאידיאליים לדברים כמו עבודת פס ייצור. אבל הם לא כל כך אוניברסליים.
רובוטים רכים שונים מתעשייתיים אורובוטים שיתופיים בכך שבנייתם עשויה מחומרים רכים וגמישים. העיצוב שלהם שונה מאוד מכל צורה אחרת של רובוטים, ורובוטים רכים דומים מבצעים פונקציות שונות מאוד.
רוב הרובוטים הרכים עדיין נמצאיםבשלבי ההתפתחות הראשונים, והרובוט הרך הראשון פותח בשנת 2011 על ידי פרופסור הרווארד ג'ורג 'וויטסיידס. מאז, מספר וסוגי הרובוטים הרכים גדלו באופן דרמטי. למרות שהם עשויים להיות במרחק כמה שנים מהכדאיות המסחרית שלהם בפועל, הם עדיין מייצגים טכנולוגיה מרגשת עם פוטנציאל רב.
רובוטים רכים - חידוש מרגש בעולםרובוטיקה. חמשת סוגי הרובוטים הרכים הנ"ל עשויים להיות בעלי הפוטנציאל המסחרי הגדול ביותר מבין כל סוגי הרובוטים הרכים המפותחים כעת.
שלא כמו רובוטים תעשייתיים או משתפים פעולה, רובוטים רכים משרתים מגוון רחב של יישומים.
כיצד משתמשים ברובוטים רכים?
המשיכה של רובוטים רכים נעוצה בגמישותם ובגמישותם.
6 סוגים מבטיחים של רובוטים רכים
ישנם סוגים רבים ושונים של רובוטים רכים, אך ישנם 6 יישומים שונים המבטיחים את הפוטנציאל המסחרי הגדול ביותר.
- שרירים רובוטיים: כמה סוגים נמצאים כעת בפיתוחרובוטים רכים שיפעלו כשרירים רובוטיים. אחד מאבות הטיפוס המבטיחים ביותר שואב השראה מאוריגמי. המבנה המקופל שלו יכול להרים פי 1,000 ממשקלו ולהתאמץ מכמה מילימטרים למטר באורך. בנוסף, מדענים עובדים כעת על יצירת רובוטים ננומטריים מ-DNA.
- רובוטים מטפסים:לרובוטים מסוג זה פוטנציאל רביישומים החל מבדיקת מבנים ותחזוקתם ועד פעולות חיפוש והצלה גרסה אחת של הרובוטים המטפסים הרכים בעיצוב מעוגל דומה מאוד לזחל. זה מאפשר לו לזחול מעלה ומטה במבנים בגדלים שונים.
- רובוטים אכילים. הפרויקט הראשון של רובוטים כאלה נוצר על ידי צוות בית הספר בפילדלפיה לתחרות השנתית הרובוטיקה הרכה. רובוטים מתכלים אלה יכולים להעביר תרופות בבטחה לחלקים שונים בגוף.
- רובוטים לבישים.מכשירים ביומימטיים אלה יכולים לעזורמטופל שעובר שיקום גופני. הרובוט הרך מחקה את התנועה הטבעית של הגוף באשר היא, ומסייע למטופל להחזיר את התפקוד המוטורי הרגיל.
- רובוטים תותבים.ניתן להשתמש ברובוטים רכים ליצירהתותבות מעולות לאנשים שחסרים להם איברים או חלקי גוף. לעתים קרובות, טכנולוגיית רובוטיקה רכה משמשת בקצה יד תותבת כדי לאחוז בצורה עדינה ומדויקת יותר חפצים.
- רובוטים לאסטרונאוטים. מדענים של נאס"א מציעים שיום אחד הם יעופו על פני מאדים. אחרים כבר מתכננים רובוטים שיעבדו בחלקים הקשים ביותר בגוף האדם.
למרות שניתן להשתמש ברובוטים רכים גם בסביבות תעשייתיות - במיוחד כרובוטים משותפים (המכונים גם "קובוטים") העובדים עם בני אדם, הם כמעט לא מוגבלים לכך.
הרובוט האוטונומי הרך הראשון בעולם
בשנת 2016 השתמשו מדענים מהרווארדגומי סיליקון נוזלי לפיתוח Octobot, הרובוט האוטונומי הרך הראשון בעולם. בהשראת התמנונים, הרובוטים הרכים הללו יכולים להסתובב ולהתגבר על מכשולים שאולי לא יהיו אפשריים עבור רובוטי מתכת חדים ונוקשים כמו אלה המתוארים ב"המחסל" או "מלחמת הכוכבים".
באופן מפתיע, אוקטובוט זול יותר לייצור,מאשר לאטה, וזה עולה רק 5 סנט לתדלק אותו. אפשר לדמיין מאות רובוטים רכים זולים שנשלחים לחקור את המקום, להתגבר על מכשולים וצוואר בקבוק כדי לסייע במבצע החילוץ.
"המטרה העיקרית של רובוטיקה רכה היא לא ליצורמכונות מדויקות במיוחד, כי כבר יש לנו אותן, "אמרה המהנדסת הביו-רפואית ג'אדה גרבוני בשיחת TED שלה בשנת 2018. "וכדי לגרום לרובוטים לעמוד במצבים בלתי צפויים בעולם האמיתי."
רובוטים רכים ברפואה
ניתן להשתמש ברובוטים רכים כ-מכשירים כירורגיים ורפואיים (בפרט אנדוסקופים). היתרון שלהם הוא שהם עוברים דרך מבני גוף ביתר קלות מכפי שמכשירים מסורתיים יכולים. זה נותן לרופאים תמונה ברורה יותר של אזור גופו של המטופל אותו הם רוצים לבחון.
ביגוד רובוטי רך לחלוטין שיכול לעזור לאנשים לנוע קרוב יותר למציאות עם פיתוח מערכת כוח גמישה וקלה חדשה לרובוטיקה רכה.
גילוי שנעשה על ידי צוות מבריסטולהאוניברסיטה, עשויה לסלול את הדרך למכשירי עזר לבישים לאנשים עם מוגבלויות ולסובלים מניוון שרירים הקשור לגיל. המחקר פורסם היום ברובוטיקה מדעית.
 משאבה דקה וקלת משקל בגודל כרטיסי אשראי. קרדיט: טים עוזר, אוניברסיטת בריסטול.
משאבה דקה וקלת משקל בגודל כרטיסי אשראי. קרדיט: טים עוזר, אוניברסיטת בריסטול.
רובוטים רכים עשויים מחומרים גמישים,שיכולים להתמתח ולהתפתל. ניתן להשתמש בחומרים אלה ליצירת שרירים מלאכותיים המתכווצים כאשר נשאב אליהם אוויר. רכותם של שרירים אלה מאפשרת שימוש בבגדים תומכים. עם זאת, עד כה, השרירים המלאכותיים הפנאומטיים הללו מונעו על ידי משאבות אלקטרומגנטיות קונבנציונאליות (מונעות-מנוע), מגושמות, רועשות, מורכבות ויקרות.
חוקרים בבריסטול SoftLabומעבדת הרובוטיקה בבריסטול, בראשות פרופסור לרובוטיקה ג'ונתן רוסיטר, הדגימו בהצלחה משאבה אלקטרו-פנאומטית חדשה, רכה, גמישה, זולה וקלה לייצור.
במאמר, הצוות מתאר כיצד הרך החדשמשאבה בגודל כרטיס אשראי יכולה להניע שרירים מלאכותיים עם שלפוחית אוויר ולשאוב נוזלים. הצוות גם מתווה את צעדיהם הבאים להפוך בגדים חזקים למציאות.
כמו כן, פולימרים טיטניום מבוססי פחמןניתן להשתמש בשילוב עם פולימרים סינתטיים ליצירת שרירים מלאכותיים דקיקים במיוחד. טכנולוגיה זו הוצגה ברפרודוקציות אמנות של פרפרים רוקדים, עלים מתנפנפים ופרחים פורחים במכון המתקדם למדע וטכנולוגיה בקוריאה.
כיצד פועלים רובוטים רכים?
רובוטים רכים שתוכננו במיוחד עבורחיקויים של החיים, חייבים להיות נתונים לעיתים קרובות למתח מחזורי בעת מעבר או ביצוע מטלה אחרת. לדוגמא, במקרה של הרובוט הדמומי או הדיונון המתואר לעיל, הוא ידרוש אלקטרוליזה של מים והצתה של גז כדי לנוע, וכתוצאה מכך התרחבות מהירה כדי להניע את הרובוט קדימה. התרחבות והתכווצות חוזרת ונפיצה זו תיצור עומס מחזורי עז על החומר הפולימרי שנבחר. רובוט מתחת למים באירופה יהיה כמעט בלתי אפשרי לתיקון או להחלפה, ולכן יש להקפיד לבחור חומר ועיצוב שממזערים את התרחשותם והתפשטותם של סדקי עייפות. בפרט, יש לבחור חומר עם מגבלת סיבולת או תדר משרעת מתח שעליו מאפיין העייפות של הפולימר כבר אינו תלוי בתדר.
מאז רובוטים רכים עשויים רכיםחומרים, יש לקחת בחשבון את השפעות הטמפרטורה. מתח התשואה של החומר נוטה לרדת עם הטמפרטורה, ובחומרים פולימריים השפעה זו בולטת עוד יותר. בטמפרטורות בחדר ובטמפרטורות גבוהות יותר, שרשראות ארוכות בפולימרים רבים יכולים להימתח ולהחליק אחת על השנייה, ומונעות ריכוז מתח מקומי באזור אחד והופכות את החומר לפלסטי. אך מרבית הפולימרים עוברים טמפרטורת מעבר רקיבית ושבירה שמתחתיה אין מספיק אנרגיה תרמית כדי שרשראות ארוכות יגיבו בצורה משיכה זו, והרס הוא הרבה יותר סביר. האמונה כי הנטייה של חומרים פולימרים להיות שבירים בטמפרטורות נמוכות היא הגורם לאסון מעבורת הצ'לנג'ר ויש לקחת אותה ברצינות רבה, במיוחד עבור הרובוטים הרכים שיוצגו לרפואה. טמפרטורת המעבר הצינורית לשבירה אינה חייבת להיות מה שיכול להיחשב "קר" והיא למעשה מאפיין של החומר עצמו, בהתאם לגבישיותו, קשיחותו, גודל קבוצת הצד (במקרה של פולימרים) וגורמים אחרים.
חסרונות הטכנולוגיה
רובוטים רכים אינם חפים מחסרונותיהם.באופן ספציפי, המדענים גילו שמפעילי נוזלים - המכשירים שבעצם מפעילים רובוטים - איטיים להפעיל בגלל כמות הנוזל העצומה הנדרשת לתנועה, או בגלל שהזרימה שלהם מואטת על ידי מבנים שונים בתוך המכשיר (כגון צינורות ושסתומים ).
עם זאת, חוקרי הרווארד מתפתחיםדרך לעקיפת הבעיה. כאשר הם מציינים כי כיפוף צעצועים כאלה משחרר אנרגיה רבה, הם מעצבים מפעילים עם שני כיסויים להחלפה, אחד בתוך השני. כאשר הכובע החיצוני מנופח, הלחץ עולה על הכובע הפנימי. כאשר היא מתכופפת, שחרור האנרגיה מניע את המכשיר.
לרובוטים רכים יש פוטנציאל זהמשתרע עד מאדים ובחזרה, והם ללא ספק יהפכו לחלק גדול מהחברה בשנים הקרובות. יכולותיהם מוגבלות רק על ידי הדמיון האנושי.
רובוטים ובני אדם רכים
רובוטים בעלי גוף רך מציעים את ההזדמנות לאינטראקציות חברתיות ומישושיות בין בני אדם לרובוטים, הדורשות בחינה מדוקדקת של האפשרות של קשרים רגשיים בלתי הולמים והתנהגות אישית והרסנית של המשתמשים. נושאים אתיים הקשורים לאינטראקציה בין אדם לרובוט וכיצד עליהם לתרום לעיצוב רובוטיקה רכה בהקשר של אינטראקציה חברתית נידונים במאמר בכתב העת Soft Robotics.
תומאס ארנולד ומתיאס שויץ, אוניברסיטת טאפטס,מדפורד, מסצ'וסטס, כתב יחד מאמר שכותרתו "האתיקה המישושית של הרובוטיקה הרכה: תכנון מושכל לאינטראקציה בין האדם לרובוט." הם בוחנים מגוון רחב של נושאים, כולל יכולתם של רובוטים רכים לגעת ולתקשר עם סביבתם, את הסיכונים הפוטנציאליים של יצירת קשרים רגשיים אנושיים חד כיווניים עם רובוטים, ולמה צריך להיות מיועד רובוטים חברתיים. כדי להמחיש כמה מהנושאים האתיים הקשורים לרובוטיקה רכה והסיכונים הפוטנציאליים לחברה, הכותבים דנים בדוגמה של רובוטים מיניים.
ארנולד ושויץ מציעים שלושה נפוציםהעיקרון של פיתוח רובוטיקה רכה בהקשר של אדם חברתי ורובוט. הם מעודדים את קהילת הרובוטיקה הרכה לטפל בסוגיות אתיות אלה כדרך לשפר את האיכות והיעילות של האינטראקציה בין האדם לרובוט. "טכנולוגיית רובוטים רכה תביא לנו בקרוב מכונות המתקשרות ישירות עם בני אדם; חשוב שנתחיל לחשוב על ההשפעה שיש להם על מצבים חברתיים. מאמר זה מתאר כמה מהנושאים המרכזיים ומספק הנחיות מצוינות לדיון רציני ביחסי האדם-רובוט, "מסכם בארי א. טרימר, דוקטורט, המנהל את המעבדה לנוירומכניקה ומכשירים ביומימטיים באוניברסיטת טאפטס במדפורד, מסצ'וסטס. .
קרא גם
המפה המדויקת הראשונה של העולם נוצרה. מה רע בכולם?
הסתכל בתמונות האבל של ערפיליות פלנטריות.
פיזיקאים יצרו אנלוגיה של חור שחור ואישרו את התיאוריה של הוקינג. לאן זה מוביל?