מי הם רובוטים?
לפני כמה שנים הופיע דבר מגניב ב- Reddit - מדענים תיארו מורכבים
רובוטיקה היא יישום סינרגטיתחום פעילות. זה מורכב מתכנות, מכטרוניקה וקיברנטיקה. מכטרוניקה היא משהו שמתקשר עם העולם האמיתי. והקיברנטיקה היא מדע רב-קישורי, הכולל, קודם כל, ניהול של תוכניות שנוצרו.
מהו רובוט?לפני 15 שנה, רבים היו אומרים שזו זרוע רובוטית שעובדת במפעל ועושה ריתוך או צביעה. תשובה פופולרית נוספת היא רובוט האנדרואיד מעולם הקולנוע. אבל האם עגלה נעה או רכב בלתי מאויש הם רובוט? כן, זה גם אחד מתחומי הרובוטיקה. מטוסים הם גם רובוטים, חלק מהפיתוחים האחרונים כוללים טכנולוגיות חכמות והם, למעשה, רובוטים אוטונומיים.
 העגלה הניידת היא גם רובוט
העגלה הניידת היא גם רובוט
יש גם תחום של רובוטיקה כמו שדהרובוטיקה - "רובוטיקה ניידת". זה כולל את כל הרובוטים שנעים בשדה, בבניין או מתחת למים. היישום המעניין ביותר, לדעתי, הוא החקלאות.
היסטוריה של כלי טיס
ההיסטוריה של המטוסים החלה בעברמֵאָה. לפני כן עפו רק בלונים ללא מנוע, והיה קשה לקרוא להם רובוטים. בתחילת המאה הקודמת פעלו שני סוגי מטוסים - ספינות אוויר ומטוסים. הטיסה המבוקרת הראשונה נעשתה על ידי האחים רייט. יתר על כן, הטייס האוטומטי הראשון הופיע די מהר, כמעט 10 שנים לאחר מכן, הוא עזר לייצב את הטיסה.
הכיוון הנוכחי של הרובוטיקה קשור לפיתוח וזמינות של טייסים אוטומטיים פתוחים חדשים כגון PixHawk (PixHawk היא חומרה פתוחה לבקרים, מל"טים ומל"טים אחרים. היא משמשת למטרות אקדמיות, חובבות ומקצועיות). דוגמה להגעת מזל"טים לחייו של כל אדם היא משלוח פיצה של חברת דודו פיצה יחד עם קופט אקספרס - זה קרה ב-2014.
 היסטוריה של כלי טיס
היסטוריה של כלי טיס
כיצד נשלט המל"ט
מטוסים מודרניים משתמשים באחדמשלושת העקרונות של יצירת עילוי - אווירוסטטי, סילון או אווירודינמי. העיקרון האווירודינמי של טיסה ויצירת עילוי (השלכת חלק מהאוויר) יכול להיות מיושם או בשל התנועה של המנגנון כולו, המצויד במשטח נושא קבוע (כנף), או בשל התנועה של חלקים נושאים בודדים. של המנגנון (רוטור ראשי, מאוורר) ביחס לאוויר.
 איך מכשירים עפים
איך מכשירים עפים
לרחפן יש מדחף שיוצר עילוי.לאחר שירד מהקרקע, המכשיר מתחיל להזיז את המדחף מהר יותר ומתרומם. אבל כוח הפעולה שווה לכוח התגובה. כאשר המדחף מסתובב נוצר מומנט בכיוון ההפוך - זהו העיצוב של מסוקים ומסוקים. אם למסוק יש מדחף אחד, הוא לא יהיה יציב. לכן, המכשיר משתמש בסכימת שני רוטורים או ברוטור זנב.
לקוואדקופטר יש עיצוב פשוט מאוד -בדרך כלל יש לו ארבעה ברגים, שניים מהם מסתובבים בכיוון אחד ושניים בכיוון השני. אם המשתמש צריך להתקדם, חלק מהמדחפים מסתובבים לאט יותר בעוד שאחרים מסתובבים מהר יותר. ואם המשתמש רוצה להסתובב, אז כמה ברגים הממוקמים באלכסון מאיצים, בעוד שאחרים מאטים.
 איך קוואדקופטר טס
איך קוואדקופטר טס
תנועות המסוק בפינות קשורות לתנועה לאורךקואורדינטות. אם הטייס רוצה להתקדם, עלינו להטות תחילה את המל"ט קדימה, ולאחר מכן, כשהמכשיר החשמלי נמשך קדימה, לייצב אותו בנקודה בה אנו רוצים להישאר.
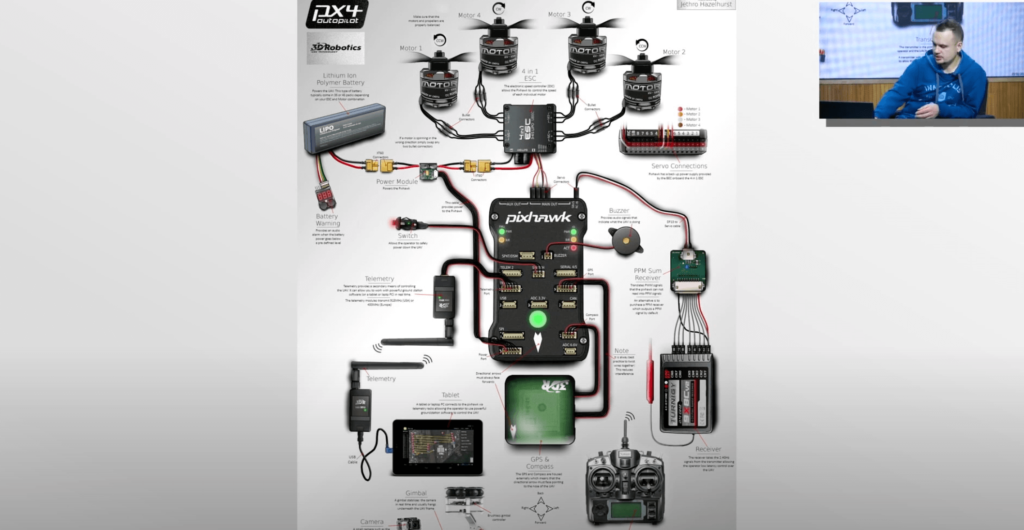
זהו תרשים של אחד הטייסים האוטומטיים הפופולריים ביותר,שעל בסיסם ניתן לייצר מכשירים חדשים. הוא מתחבר לכל המנועים והחיישנים. יתרה מכך, למנועים יש יחידת בקרה משלהם, ווסת ESC - Electronic SpeedController, השולטת על מהירות המנוע.
מבין החיישנים, יש GPS כך שהרחפן יכוללעבוד בחוץ, לטוס לנקודות ולייצב את המיקום. אבל בתוך הטייס האוטומטי עצמו יש גם IMU - מודול חיישן אינרציאלי המאפשר לו לקבוע זוויות גישה. יש גם ערוץ תקשורת, עמדת שליטה קרקעית וסוללה.
 מכשיר מל"ט
מכשיר מל"ט
כאמור, יש רמהבקרת מנוע - אנו, ללא היסוס, יכולים לקבוע את מהירות הסיבוב. שאר הרמות פועלות על אותו עיקרון: הבא הוא בקרת התמצאות.
אבל קודם אנחנו צריכים לשלוט על מהירות הסיבוב- מסוקי FPV טסים ברמה זו (מכשירים המאפשרים לצפות בתמונה ממצלמת הרחפן בזמן אמת מגוף ראשון (FPV - First Person View). טייסים מנוסים קובעים את מהירות הסיבוב ומנווטים כל הזמן עם הג'ויסטיק. הבא השלב הוא כאשר המשתמש יכול לייצב את הזווית, אך המל"ט עדיין יזוז. הבא הוא בקרת מהירות, והגבוהה היא בקרת מיקום, תמרונים לנוע לנקודה או לנוע לאורך מסלול נתון.
מי שרוצה לתכנת, לבנות ושליטה ברחפנים - צריך לשים לב לטייס האוטומטי PIX4 בקוד פתוח. יש קהילה שלמה סביב רובוטיקה אווירית (ROS - מערכת הפעלה רובוטית, או רובוטיקה פתוחה), יש סימולטורים לרחפנים. לכן, ניתן לבצע ניסויים רבים בסימולטור ללא הרחפן עצמו.
שלבי פיתוח רחפנים
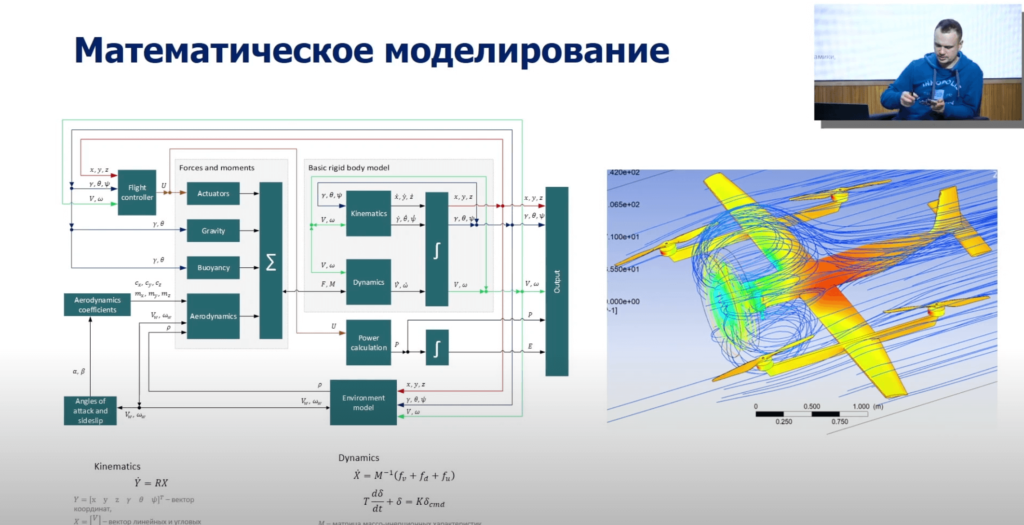
חוקרים מתחילים עם מושגמודלים, ואז הם צריכים לבנות מודל מדויק של המנגנון. מבלי להיכנס לנוסחה, דגם קופטר הוא בעצם דגם גוף קשיח. זהו החוק השני של ניוטון המורחב למערכות של חלקיקים. יש לו תנועה טרנסלציונית וסיבובית, יש קינמטיקה ודינמיקה של תנועה, וכדי לתאר את הדגם של מכשיר ספציפי, עלינו להוסיף כאן את משוואת הכוחות הפועלים על מזל"ט ספציפי.
 איך מדגמים מל"טים
איך מדגמים מל"טים
השלב הבא הוא פיתוח המערכתהַנהָלָה. אם נלך בדרך הקלאסית: ראשית אנו מגלים את המודל המתמטי המדויק, ועל בסיסו, אנו כבר מסנתזים את אלגוריתם הבקרה או נוסחאות חדשות. ניתן לכלול את כל הרמות במערכת הבקרה: תכנון תנועה, תפיסת סביבה, הערכת מצב בעזרת חיישנים. אלגוריתמים מאפשרים לנו לחדד את הקואורדינטות והנתונים שלנו.
 מערכת בקרת מזל"ט
מערכת בקרת מזל"ט
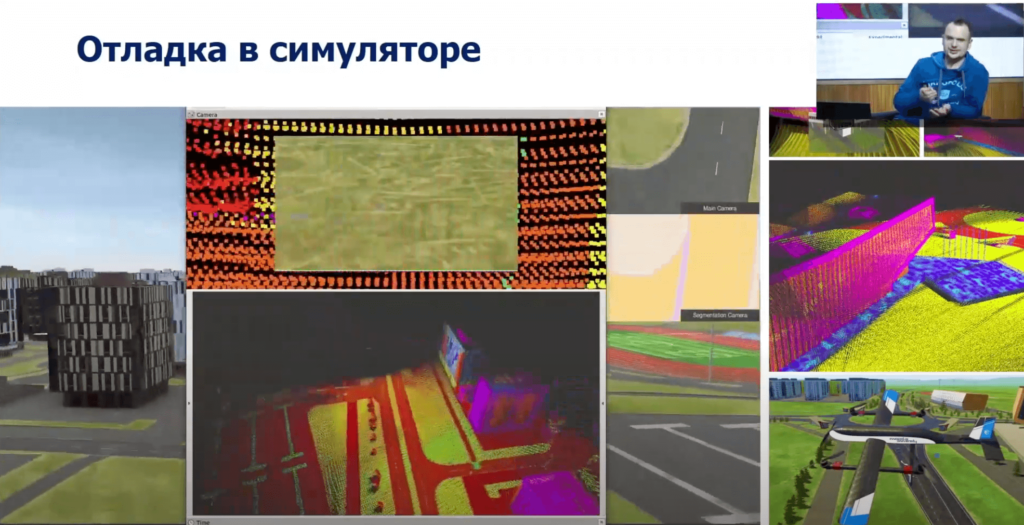
כאשר יש אלגוריתם בקרה, זה יכול להיות באופן מיידילהחיל, אבל לעשות זאת הוא די יקר. מכשירים קורסים בשגיאה הקטנה ביותר - יש לקחת זאת בחשבון ולבצע גיבויים. סימולטורים משמשים לבדיקה.
להלן סיור וירטואלי באינופוליסהוא מוצר של האוניברסיטה שלנו, הוא זמין להורדה ב-GitHub. זה לא רק מרכיב ויזואלי, אלא גם הנתונים של כל חיישני המכשיר. יש לו את כל חיישני המיקום, הוא נשלט כמו מזל"ט ויכול לנפות באגים בכל אלגוריתמי הבקרה.
 איך מל"טים לומדים בסימולציה
איך מל"טים לומדים בסימולציה
כאשר מבוסס על ניסיון עם הסימולטור מופיעיותר ביטחון - אתה יכול לעבור ליישום חומרה. מרכיביו מוצגים כאן: ייצור המכשיר מפחמן ומקומפוזיט, יצירת אלקטרוניקה, מיקום מנועים, הידוק שלהם.
בדיקות לא מתחילות ברחוב:ראשית, המכשירים נבדקים על מתלה או מעמד מיוחד. הם יכולים לשמש לאיתור באגים באלמנטים של תפקוד כלי טיס בלתי מאויש. לדוגמה, מוצג כאן מטוס המראה ונחיתה אנכי - זהו הכלאה של מסוק ומטוס בסרטון ניתן לראות כיצד הוא מתמודד עם הפרעות חיצוניות ושומר על זווית. בצד ימין יש ניסוי די מטורף שבו אתה מדליק חמישה מנועים בבת אחת ורואה איך מערכת הבקרה מטפלת בזה.
 איך בונים מזל"טים
איך בונים מזל"טים
לאחר בדיקה, הם עוברים לטיסות -המראות קטנות במהירויות נמוכות, תנועה מבוקרת עם טייס שיכול להשתלט. האקורד האחרון הוא טיסה בלתי מאוישת לחלוטין.
המכשיר ממריא אנכית -"כמו מסוק", ואז המנוע הראשי שלו נדלק, המל"ט מאיץ, עובר למצב מטוס ומפתח מהירות מספקת כדי שהכנף תעבוד. לאחר מכן מכבים את מדחפי המתאר, והוא עף כמו מטוס - תהליך הנחיתה מתבצע בסדר הפוך.
מה קורה עם מזל"טים
אחת המשימות המודרניותמדענים - עוקפים מכשולים בטיסה. כמה מל"טים כבר יודעים לעשות זאת, אבל המשימה קצת יותר רחבה - צריך ללמד את המכשירים לנוע כמה שיותר מהר בסביבה עם מכשולים. ועדיין יש מקום לשאוף ולשפר את האלגוריתמים.
דוגמה נוספת לבדיקה כזו היא טיסה אליַעַר. ישנה גישה מאוד מעניינת - כאן משתמשים לא רק באלגוריתמים חדשים, אלא גם בחיישנים - מצלמת אירועים. מדובר במצלמה בתדר גבוה מאוד שמעבירה את ההבדל בין פריימים בכל יחידת זמן: זו מאפשרת לשלוט במהירות ולהגיב למכשולים.
בתחום תכנון תנועת רחפנים,תחרות: מי יעשה את זה מהר יותר. המשימה היא למפות אזור לא ידוע, לבנות את הייצוג התלת מימדי שלו, למצוא עליו אובייקטים. טסנו באוניברסיטה, אבל פתרנו גם את הבעיה של מציאת חפצים. התוצאות שלנו היו אפילו טובות יותר מאלגוריתמים ידועים שפורסמו.
יש תחרויות במירוץ המל"טים.הם מיוצרים במכשירים עם מצלמה, כאשר לטייס יש משקפי מגן ושולט ברחפן על מנת לעוף דרך השער כמה שיותר מהר. אירוע מרהיב למדי, שבו יש לבצע את אותה משימה במצב אוטומטי. לרוע המזל, עד כה המחשב הצליח להביס אדם רק בשחמט, ורובוט המל"ט לא הצליח לעקוף טייס אנושי, למרות שההתקדמות כבר די רצינית. מזל"ט בעזרת אלגוריתם ראיית מכונה יכול לבצע משימות כאלה, העבודה היא רק להגביר את המהירות.
תחרות נוספת היא Microsoft Games ofמל"טים, זה מתבצע בסימולטור. אחת התחרויות המובילות המפורסמות בערב הסעודית מתקיימת באותו אזור. המשתתפים שם מגויסים לשלוש שנים מראש.
מכשירים בלתי מאוישים משמשים למופעי רחפנים- אלו אירועים מרהיבים שהיום הפכו לתחליף לזיקוקים. אבל זה לא השימוש היחיד בקבוצה - הם יכולים לבדוק שטח גדול יותר.
היכן חלים
כדי שזה לא ייראה מדעי בלבדפיתוח, להלן הדגמה של מזל"ט Skydio. כעת זהו המכשיר המתקדם ביותר מבחינת אוטונומיה. זוהי דוגמה לאופן שבו נעשה שימוש בטכנולוגיות מודרניות - קרטוגרפיה, הימנעות ממכשולים, תכנון תנועה יחדיו במוצר שכבר זמין למשתמש.
כיוון נוסף הוא עיצובים חדשיםכְּלִי טַיִס. אחד מהם הוא רחפנים מתקפלים. מכשיר אחד כזה יכול לעוף לתוך חללים צרים לבדיקה לאחר תאונה. דוגמה נוספת היא מזל"ט שיכול להתפתח. לדוגמה, הוא יכול לעוף מתוך צינור פניאומטי צר ואז לעוף כרגיל.
יש לנו גם פרויקט בתחום הזה - זהוTensodrone רך. זהו הרחפן הרכה הראשון שעף. התענוג הוא שאתה יכול להפיל אותו והוא יישאר שלם. בנוסף, ניתן לשנות את אורך הקורות, את המתח של הכבלים.
שתי דוגמאות שיתעוררו לחיים בבקרוב. ראשית, משלוח באמצעות רחפנים. עכשיו יש יישום מאוד מעניין שבו אנחנו משלבים מסוף חבילות ותחנת נחיתה של מזל"ט - במקרה זה, אנחנו לא צריכים לדאוג מתי המל"ט יגיע, איפה הוא ינחת, כדי שנוכל להגיע אליו על זמן ולאסוף את המטען לפני שהוא נגנב. הדוגמה השנייה היא מונית מעופפת. זהו תחום הפיתוח המרגש ביותר, וכבר ישנם אבות טיפוס עובדים. אבל זה יקרה רק בעשור הקרוב.
אילו התפתחויות בתחום המוניות המעופפות הופיעו במהלך 6 השנים האחרונות:
- חברת "רחף" הציגה מכשיר עםמנוע חשמלי דל רעש ומידות קומפקטיות - כמו מכונית. הוא ממריא לגובה 150 מ' ונוחת בחניה רגילה. המל"ט מיועד לשני נוסעים, המטען המרבי הוא 300 ק"ג, והמהירות היא 200 קמ"ש.
— בשנת 2016, החברה הרוסית Hoversurfהראה אופנוע רחף שאתה יכול לשאת איתך ולהמריא בכל עת ממקום חניה רגיל בעיר. הוא מגיע למהירויות של עד 100 קמ"ש, וגובה ההרמה מוגבל בכוח ל-5 מטר מטעמי בטיחות.
- בשנת 2018, פותח על ידי נוסע איירבוסמטוס Alpha One VTOL טיפס לגובה של 5 מטרים ונשאר באוויר 53 שניות. המשתמש יוכל להתקשר למל"ט דרך האפליקציה ולהגיע מנקודה אחת לאחרת הן בתוך העיר והן מחוצה לה.
- בשנת 2020 יצרה מונית אווירית סיטי איירבוסטיסה ראשונה בחינם. הבדיקות התקיימו בפרברי פריז, העיר איל-דה-פרנס. מטוס ה-CityAirbus מסוגל לנוע במהירויות של עד 120 קמ"ש למרחק של עד 30 ק"מ. משקל המונית המעופפת הוא יותר מ-2.2 טון, סיטי איירבוס מצוידת בשלושה מושבי נוסעים ומושב נהג אחד.
- בשנת 2022, הסטארטאפ הסיני Pantuo Aviation הציג את ה-T1, מפגין מוניות מעופפות עם צינור אוויר. הוא יטוס במהירויות של מעל 300 קמ"ש ויהיה לו טווח של 250 ק"מ.
קרא עוד:
גשושית החלל טסה 200 ק"מ ממרקורי. תראה מה הוא ראה
מדענים חושפים כיצד ויטמינים משפיעים על שכיחות הסרטן
קסדת קריאת מחשבות סינית משמיעה אזעקה כאשר אדם רואה תוכן פורנו