ロボットは移動するだけでなく、物体を操作することもできます。著者によれば、今日の需要は
したがって、新しい論文の著者は、パフォーマンスを向上させるためにさまざまなエンドエフェクターを装備した四肢機構に基づく設計を提示しました。
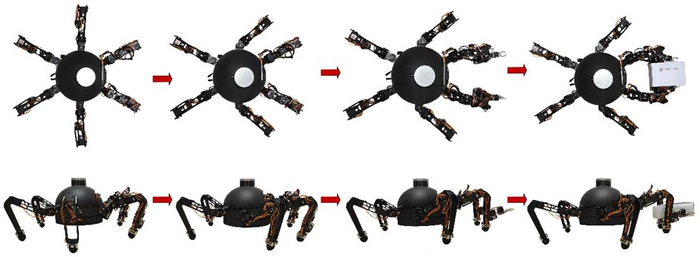
研究チームは、操作中に操作が行われたことに注目しています。体を動かすことは効率を高め、時間を稼ぐための良い方法です。この新しいロボットは「ALLOMAN ヘキサポッド」と呼ばれ、脚と腕が一体化しているため、移動可能な物体を操作することができます。
これまでのところ、ALLOMANヘキサポッドは実験的ですプロトタイプ。作業の次の段階で、作者はそれに操作するためのより多くの機能を導入する予定です。著者は、都市の安全、テロとの戦い、惑星探査など、多機能プラットフォームが必要な分野で開発を使用することを計画しています。
続きを読む:
それは何世紀にもわたって狩られてきました:太陽の隣の惑星バルカンについて私たちは何を知っていますか
天文学者は地球の近くに惑星を発見しました:それは非常に奇妙な軌道を持っています
素粒子物理学に見られる不可解な二重性:それは何につながるのか