イタリア工科大学の研究者らは、次のような三足ロボットのプロトタイプを発表した。
MARM ロボット プラットフォームは、中央の体、3 本の手足、特別なドッキング装置。後者は、デバイスの充電とデータの交換に使用されます。ロボットを作成するとき、科学者は重力の存在下と微小重力下の両方で作業する可能性を提供してきました。
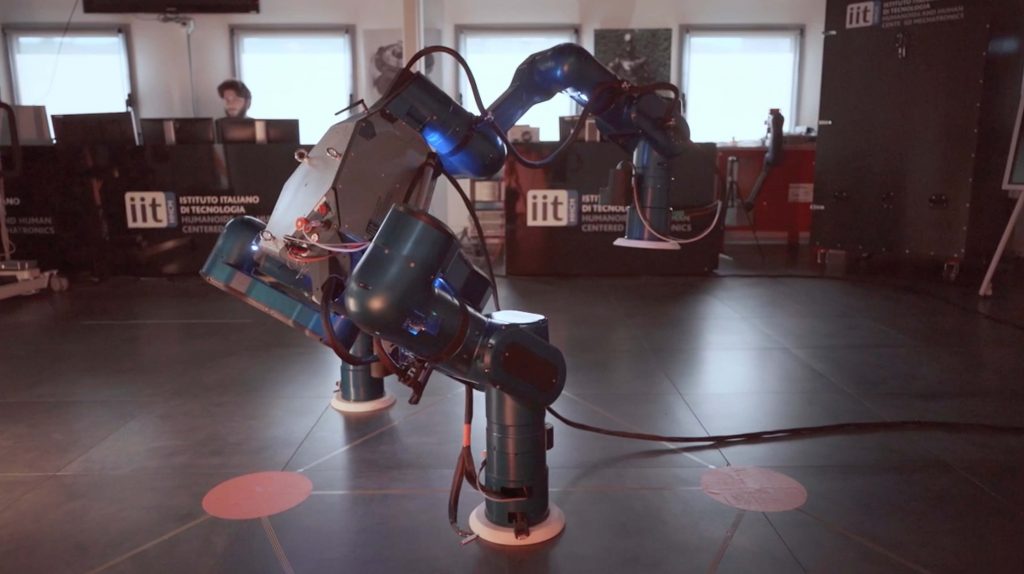
ロボットMARM。ビデオ: IIT
MARM ロボットは 3 本の手足を使ってステーションの表面にある標準の相互接続をつかみ、それらの上を這うことによる移動。また、ISS で使用される幅 1.2 m のモジュール式六角プレートの移動と設置、軌道プラグインの操作など、さまざまなデバイス コンポーネントを組み立てて配置することもできます。

ロボットMARM。写真:IIT
三肢構成 - 基本新しいロボットと以前の開発の違い。エンジニアによると、これにより、デバイスの操作の柔軟性が向上します。たとえば、彼は 2 つの「手」を使って作業し、残りの手を使って表面をつかむことができます。
研究者は、MARM を使用して次のことを行うことを提案しています。倉庫から商品を受け取り、適切な場所に移動し、収集して配置します。プロトタイプは、このシナリオを念頭に置いて微小重力でテストされ、その後、機能するバージョンが作成されて ISS に送信されます。
続きを読む:
永久凍土地帯の科学者: スマートな服とがんワクチンを開発する方法
地球から遠く離れていない場所に、2 つの惑星が発見されました。おそらく彼らは居住している
科学者たちは、恐竜の死から誰が恩恵を受けたかを発見しました