開発者は、通常のプロセスで学習する完全に自動化されたシステムを作成しました。
「このシステムでは、ユーザーとシステムは同時にお互いから学びます。これにより、ロボット義足の快適性と信頼性が向上する可能性があります」とYeng氏は言います。
ジャーナルに掲載された研究成果医用生体工学に関するIEEEトランザクションは、仮想環境で検証されています。それらは、現在存在するシステムと比較されました。テストが成功した後、研究チームはインペリアルカレッジロンドンでユーザーインターフェイスと最先端のプロテーゼをテストしました。開発者は、切断者に洗濯バサミを動かすように依頼しました。このようなテストは、理学療法士が上肢の機能を評価するために広く使用されています。
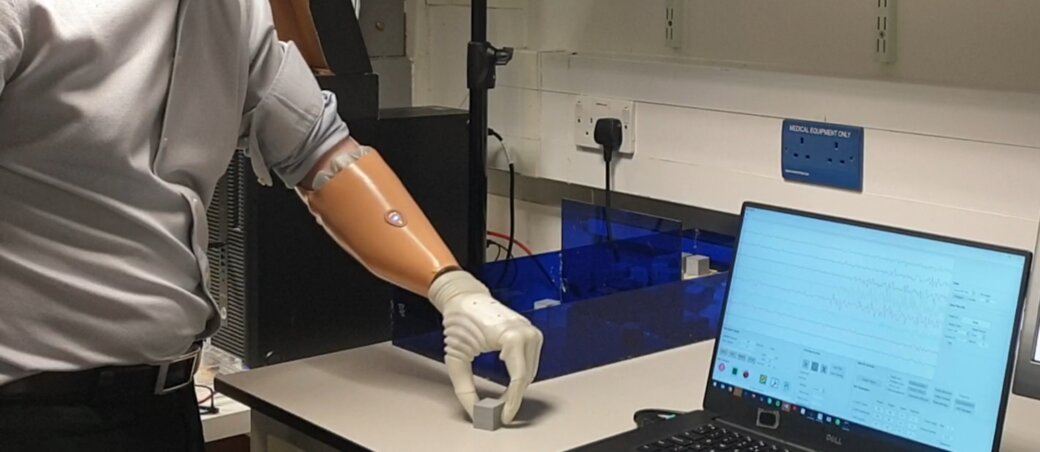 筋肉の活性化によって制御される最新の義手。アアルト大学
筋肉の活性化によって制御される最新の義手。アアルト大学
システムの機能は、制御され標準化されたテストを通じて調査されてきましたが、ユーザーのニーズは、定性的な縦断調査を通じて最もよく特定されます。
「将来の発展のためには、医療センターや義肢のユーザーとの協力を継続することが非常に重要です」とYeng氏は言います。
上肢を切断された人残りの筋肉を収縮させることにより、ロボットの義足を制御できます。プロテーゼが筋肉によって生成された電気信号を拾う接続は、筋電インターフェースとして知られています。最も高度なプロテーゼは、機械学習アルゴリズムを使用して、これらのユーザー生成信号の解釈を支援します。ただし、これらの結合は、発汗などの外部要因に非常に敏感であり、時間の経過とともに弱くなることがよくあります。この問題を解決するために、研究コミュニティは変化する状況によりよく適応できるさまざまなアルゴリズムを提供しています。
続きを読む:
科学者たちは地球上で最も健康な人々を発見しました:それはすべてユニークなライフスタイルについてです
無料のVPNの危険性。なぜダウンロードできないのか、そしてどうやって身を守るのか?
物理学者は、実験室の「ターミネーター2」からT-1000の能力を再現しました