ローザンヌ連邦工科大学のエンジニアは、ロボットに次のことを可能にする方法を開発しました。
鳥飛行装置の着陸。ビデオ: EPFL
枝に鳥を着陸させることは、最も重要なことの1つと思われます自然のプロセス。しかし実際には、時間、衝撃力、速度、動きの正確さの間で非常に正確なバランスが必要である、と開発ノートの著者は述べています。当然のことながら、これまでエンジニアはこれらの動きをロボットで再現できませんでした。
 オーニソプター着陸システム。画像: Raphael Zufferey et al., Nature Communications
オーニソプター着陸システム。画像: Raphael Zufferey et al., Nature Communications
研究者たちは正確なバランスの問題を解決しました羽ばたき飛行装置にオンボードコンピュータとナビゲーションシステムを装備します。外部ソースを使用して動きをキャプチャし、デバイスの位置を決定します。羽ばたき飛行装置の爪脚の付属器は、ドローンが止まり木をつかもうとする飛行中の上下の振動を補償するために正確に調整されていました。

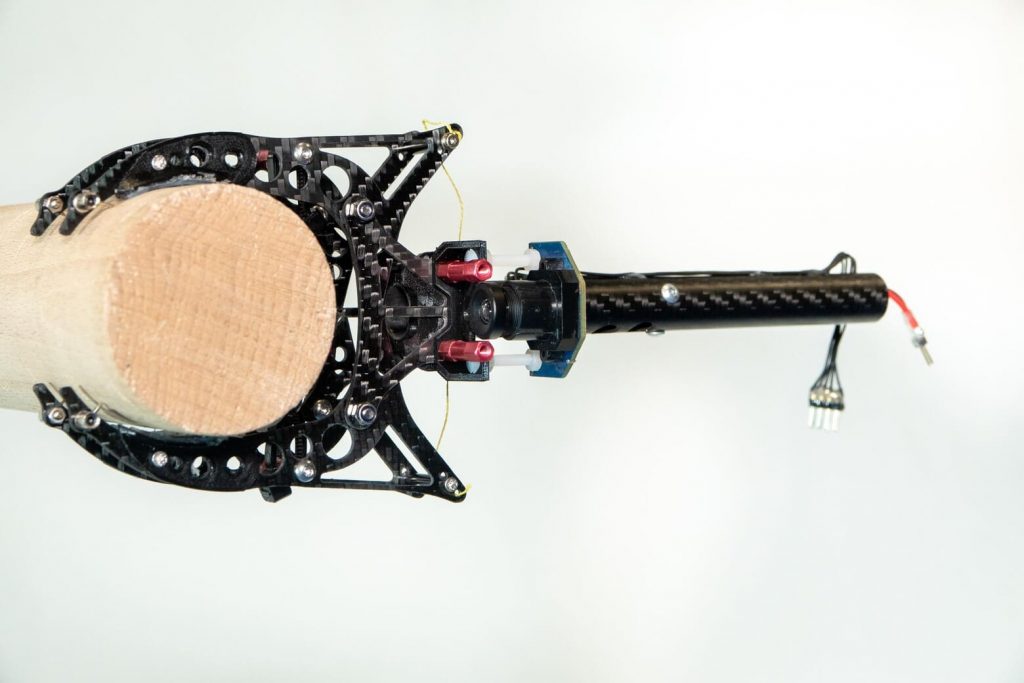
羽ばたき台マウント。画像: EPFL
爪自体は、衝突時のロボットの動きの勢いを吸収し、素早くしっかりと閉じて重量を支えます。ひとたび止まり木に着くと、ロボットはエネルギーを消費することなく止まり木にとどまります。研究者たちは現在、研究室で飛行試験を行っています。
オーニソプターが自分で学習したら木の枝に着陸すると、目立たないように生物学的サンプルを収集したり、木から測定したりするなど、特定のタスクを実行できるようになります。最終的には、人工構造物に着陸する可能性もあり、新しい用途が開かれる可能性があります。
Raphael Zufferey、開発の共著者
続きを読む:
地球から遠く離れていない場所に、2 つの惑星が発見されました。おそらく彼らは居住している
ユニークな流星が太陽系の歴史を書き換えた:それはどこから来たのか
新しい ISS のプロトタイプ モジュールは、NASA センターで爆破されました。どうだったか見て