自律型無人航空機 (UAV) の機能を拡張するため、科学者やエンジニアは
このモデルは Agilicious と呼ばれ、研究者らはこれにより、クアッドコプターは、移動中に高速であっても障害物を回避し、軌道を追跡できるようになる可能性があると主張しています。さらに、このモデルは実際の飛行と仮想シミュレーションの両方で役立ちます。
「オープンソースのAgiliciousによって、私たちは提供します研究および産業コミュニティは、柔軟性が高く、用途が広く、拡張可能なクワッドコプタープラットフォームにアクセスできます」と研究者は述べています。
出典:
科学ロボティクス
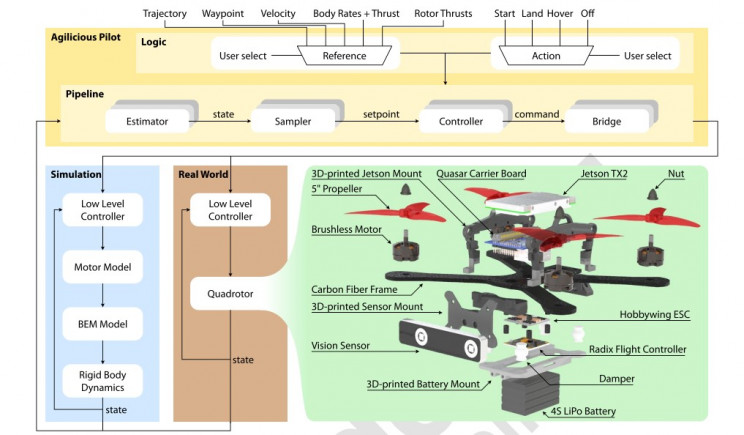
彼らが使用した Agilicious プラットフォーム高度な搭載ビジョンセンサー、飛行監視システム、その他のコンポーネント。最終的に、ドローンのリアルタイム認識、軌道追跡、飛行計画スキルが向上しました。
さらに、プラットフォームにはNVIDIAも搭載されていますJetson TX2は、ハードウェア機能をサポートするために複雑な計算タスクを実行する、強力でエネルギーを節約する人工知能モジュールです。
続きを読む:
若い星は、宇宙についての科学者の見方を変えた何かを「隠しました」。重要なこと
科学者たちは、ビタミンが癌の発生率にどのように影響するかを明らかにします
夢の中で体重を減らす簡単な方法は、すぐにボランティアでテストされます