新しい研究の著者は、モデルは予測を使用して最適にトレーニングされるという仮説を立てました。
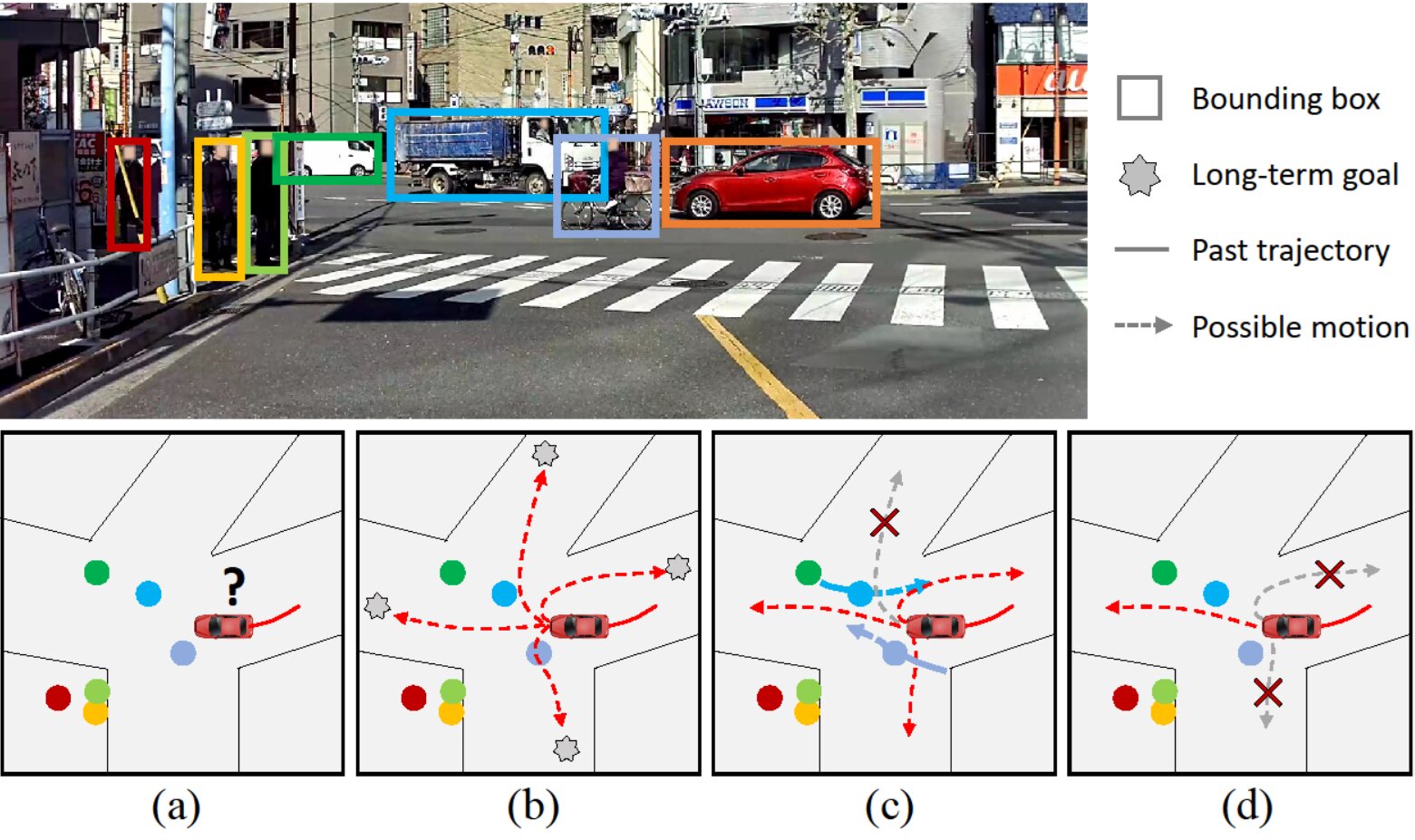
研究者らは、短期目標と長期目標の両方を考慮したアーキテクチャの開発を計画しています。これらは、歩行者や自動車の意図を評価する際の主な要素です。
たとえば、交差点にある車があります左に曲がりたい。交通のダイナミクスだけでなく、自分の欲求、他の道路利用者、障害物など、さまざまな要因によって意図がどのように変化するかを考慮することが重要です。
次に、アルゴリズムはまず、長期的および短期的な結果がどのようなものになるかを予測するためにモデルがトレーニングされた過去の経験をエンコードします。
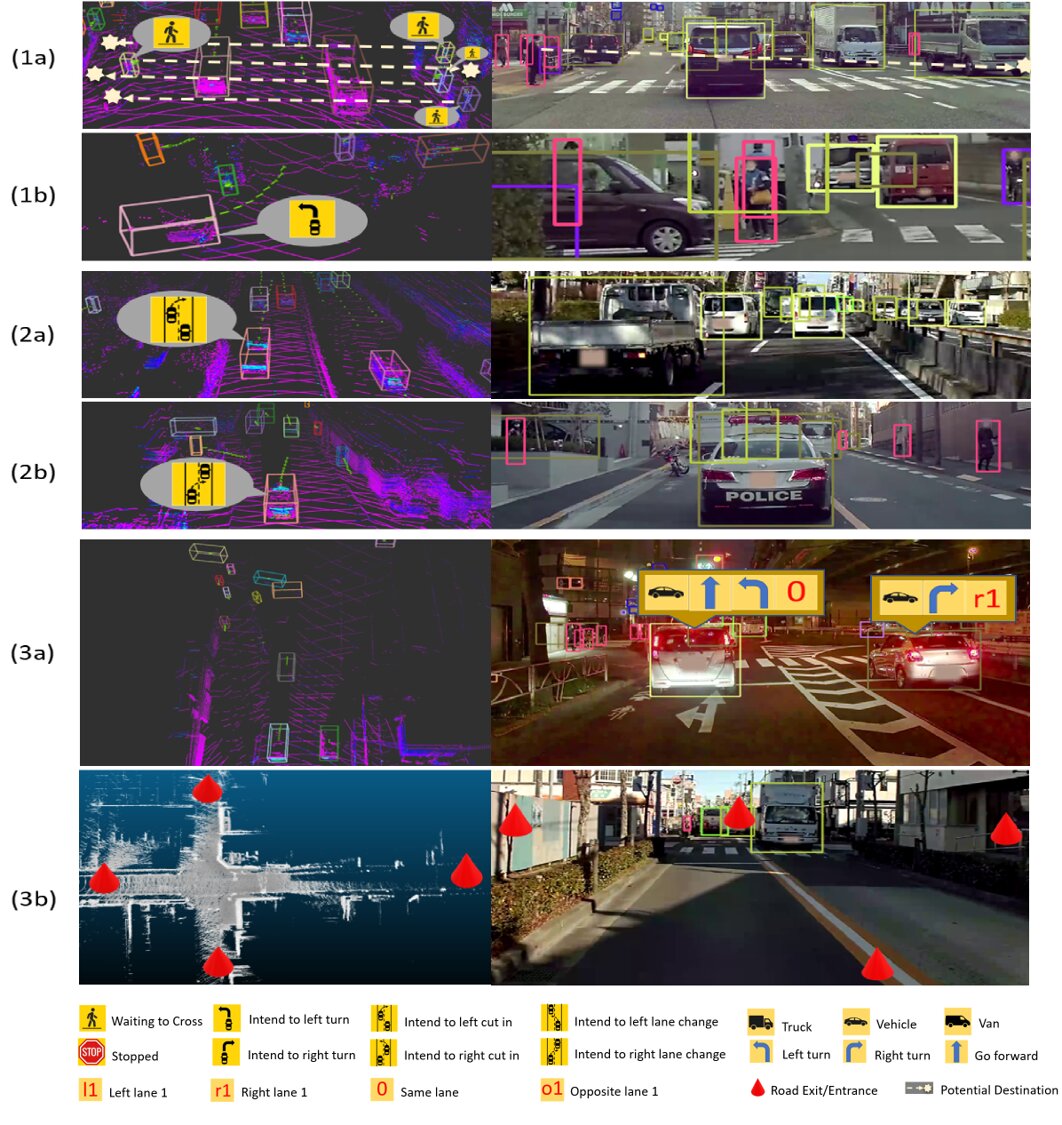
モデルは周囲のすべてのオブジェクトに割り当てます手がかりとは、途中で変化する可能性のある「意図」、エージェントの意図に影響を与える道路標識や樹木などの「環境」、天候や道路状況などの「状況に応じた手がかり」です。
研究者らは一連のテストでモデルを評価し、他の最先端の軌道予測方法よりも 27% 優れていることを発見しました。
開発者は、モデルが自動運転車の安全性とパフォーマンスを向上させるために使用されます。さらに、他の研究グループはLOKIデータセットを使用して、道路上の歩行者や車両の経路を予測するための独自のモデルを準備できます。
読むには さらに:
新しいiOS15:リリース日、iPhoneのデザインと機能。わかっていることはすべて伝えます
極薄の素材は白いグラフェンから作られました。サーバーに取って代わります
大量の武器を運ぶ強攻撃ドローンを見る