Facebookは、すでに開発されているコンピュータビジョンと自然言語処理システムを使用する予定です。
ロボットは完全に自律的になるように計画されています。そして自己学習 - システムは生データから直接学習しなければなりません。これにより、このデバイスは新しい課題にすばやく適応し、状況を変えることができます。人工知能の基礎はRLモデルに基づく学習であり、それはロボットが試行錯誤を通して独立して学ぶことを可能にするでしょう。
私たちはロボットに助けなしで歩くように教えたいです。動きはロボット工学では非常に難しい仕事です、そして、これは我々の観点からそれを非常に刺激的にします。
Facebookの研究開発者Roberto Calandra
Facebookのロボットの特徴それは、デバイスがその動きのためのアルゴリズムを実装されないということです。最初、彼は歩くことができませんでした、しかし、徐々に学習アルゴリズムを使って、彼は動きのために既に活性化されていることができる彼のコントローラーと対話し始めます。ロボットがより多くの経験を積むほど、それはうまく機能します。

この場合、ロボットは空間内の位置と向きを決定するだけでなく、バランスを保ち、膝などの複雑なメカニズムを正しく操作するためにセンサーのインパルスを互いに接続します。
Facebook のコンピューター ビジョン用ロボット動画の人気を予測するために開発されたアルゴリズムの 1 つを使用します。ニューラル ネットワークは、数秒間のビデオを分析し、視聴しなくてもさらなるフレームを予測して、膨大な量の素材の分析を高速化します。
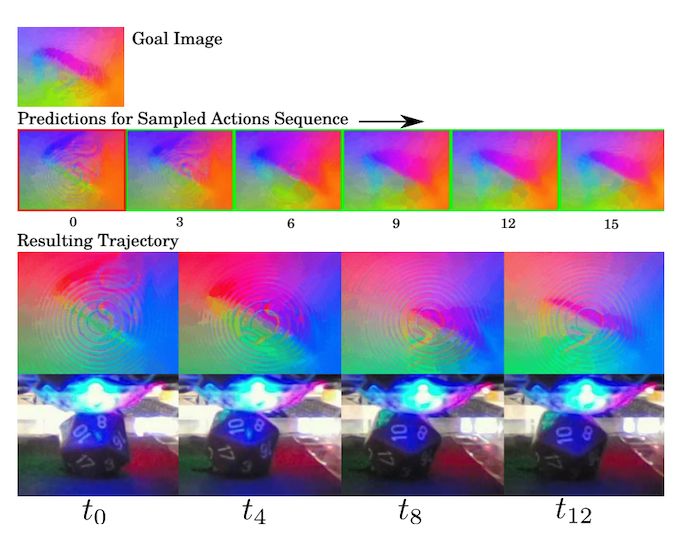
Facebookリサーチの実験の一環としてジョイスティックを操作し、20個のファセットで立方体を転がして、1秒後に落ちた結果を正しく理解できるマニピュレータという最初のデバイスを紹介しました。
Facebookによると、視覚的な情報源と触覚的な情報源を組み合わせることで、将来の自己学習プラットフォームの学習方法や機能性を向上させることができます。
開発者によると、今では同様のプロジェクトでは 1 種類 (最大 2 種類) の情報のみを使用しますが、ロボット デバイスが完全に動作するには、さまざまな感覚から情報を認識する必要があります。