イリノイ大学アーバナシャンペーン校とプリンストン大学の研究者らは、
科学者たちは小さならせんを使ったカブトムシの胸部の筋肉の働きを模倣するアクチュエーター。人工アクチュエータが小さなビームを引っ張ると、ロボットがゆっくりと曲がり、弾性エネルギーを蓄えます。解放されると、このエネルギーがロボットを押し上げます。
これまでの研究で、科学者たちは次のことを発見しました。カブトムシには特別ならせん状の筋肉があります。エネルギーを蓄え、例えば昆虫が背中を転がったときに作動します。この筋肉が急激にまっすぐになると、カブトムシの体はそのサイズの数倍の高さまで伸びます。ロボットにも同じメカニズムが働きます。
小規模ロボティクスの主な課題の 1 つは、障害物を克服したり、危険な場所をすばやく離れたりするのに十分なほど小さくても強力な設計を見つけることです。
Sameh Tawfiq、研究責任者
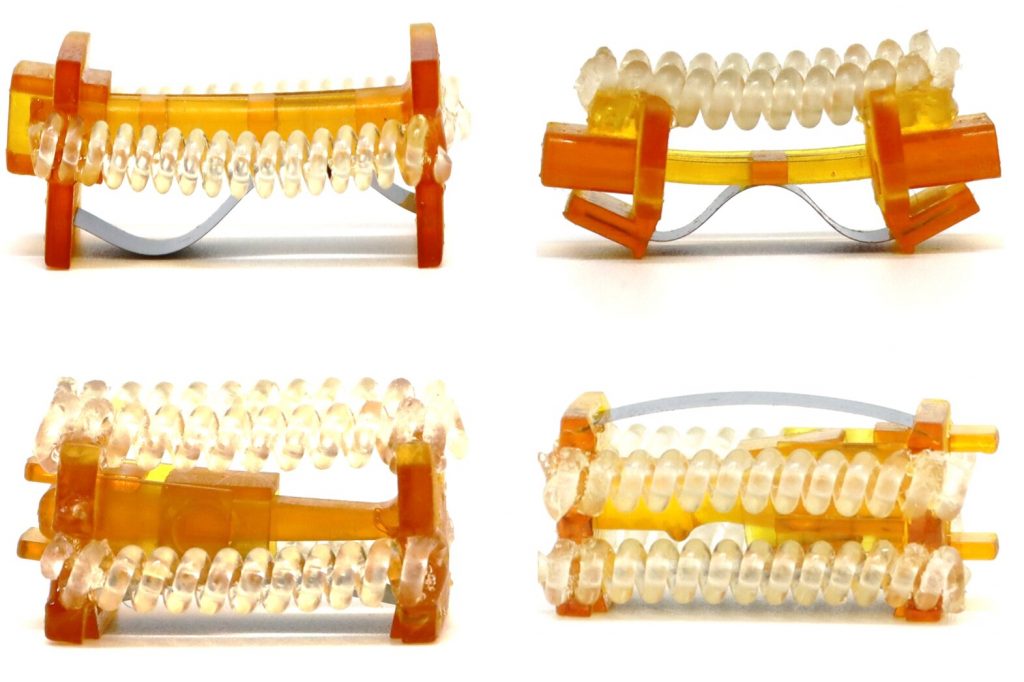 研究者によって提案されたジャンプ ロボットのデザインのバリエーション。画像: イリノイ大学アーバナシャンペーン校
研究者によって提案されたジャンプ ロボットのデザインのバリエーション。画像: イリノイ大学アーバナシャンペーン校
科学者たちは、小さなロボットが届きにくい場所に立ち入り、タービンやジェット エンジンなどの大型機械のメンテナンスを支援したり、農業で問題を特定するために写真を撮ったりして植物を検査したりします。
続きを読む:
巨大な黒点が地球に近づいています。肉眼で見える
羽根のない飛行機が飛ぶ様子をご覧ください。その速度は時速900kmを超える
天の川はその銀河フィラメントに対して異常に大きい
表紙: アイデアの芸術的なイラスト。画像: Michael Vincent、イリノイ大学アーバナ シャンペーン校