Google は調査を実施し、プロセスを高速化し、簡素化するアルゴリズムを設定しました。
何をした
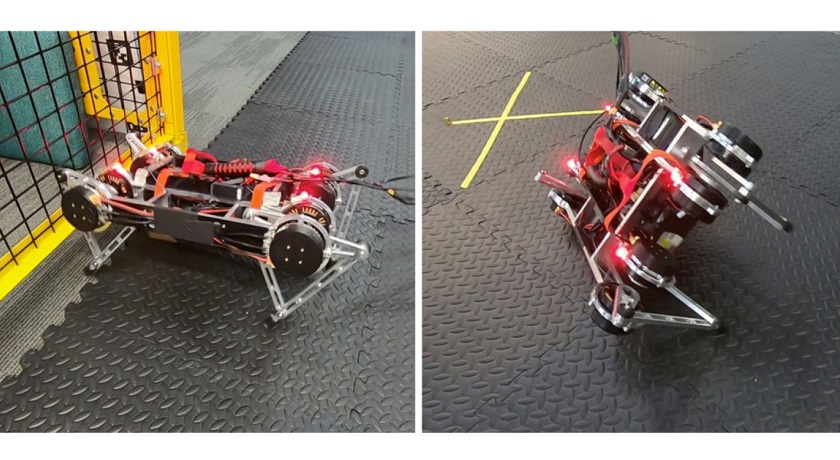
Google Robotics の研究者が作成したこの四足ロボットは、数時間以内に、前後に歩き、自分で向きを変えることを学びました。 以前は、仮想環境内の仮想ロボットでアルゴリズムがテストされており、実際のロボットへの損傷を防ぐのに役立ちました。しかし、さまざまなサーフェスをエミュレートするプロセスは多大な労力を要しました。
</ img>
研究者たちは現実世界でのトレーニングを開始しており、ロボットはでこぼこした地形にすぐに適応することができました。しかし、それでも人間の介入が必要であり、研究者は人間の学習に介入する必要がありました。そこで彼らは表面積を制限し、ロボットに一度に複数の操作を学習させた。領域の端に到達したロボットが前方に歩くと、前方に障害物があることに気づき、後ろ向きに歩き始め、新しいスキルを獲得します。
このシステムを使用することで、ロボットは試行錯誤を繰り返し、最終的にはさまざまな表面を自律的に移動する方法を学習することができました。
ただし、この研究には限界があります。この技術はまだ万能ではなく、あらゆるタイプのロボットに適しています。 しかし研究者らは、新しいアルゴリズムをさまざまなロボットに適応させたいと考えている。もし成功すれば、ロボット工学が大きく進歩する可能性があります。