最近、科学者たちは、人間の決定能力を再現することを目的とした研究を実施しました。
この記事では、視覚や音の処理だけでなく、タッチを通じて環境と相互作用できるロボットを開発することの利点を強調しています。
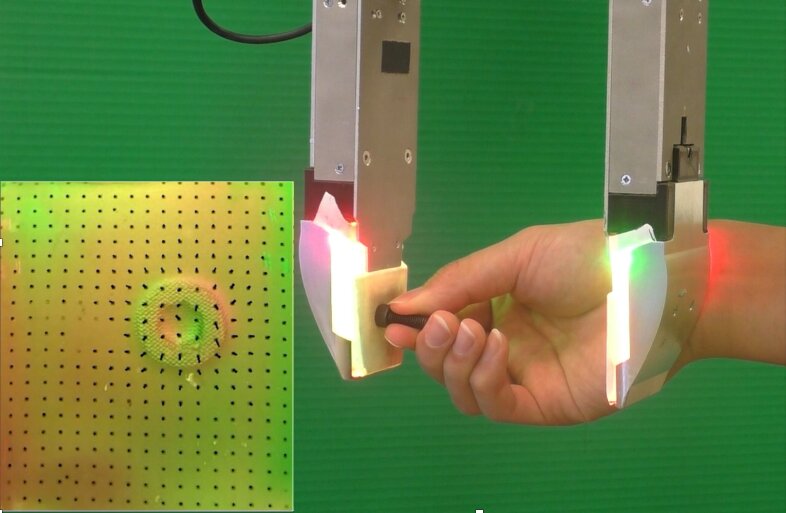
私たちの研究の目的は、高解像度の触覚センシングの助けを借りて、最初の接触からでも既知の物体を正確に特定できることを実証することでした。これは、他の外部知覚モード(視覚など)や、制御対象に関連する以前に収集された触覚データに依存しないため、触覚定位に関する以前の研究からの重要な一歩です。
研究者の一人、マリア・バウザ
新しい手法はシミュレーションから学習しますが、学習しません大規模なデータ収集が必要です。当初、研究者は、ロボットが相互作用するオブジェクトに関するデータ(たとえば、その3次元の形状、プロパティなど)にアクセスできるという条件で、特定のオブジェクトと触覚センサーの間の接触をシミュレートする構造を開発しました。
次に、研究者らは、コンピュータービジョンと表現のトレーニングに最先端の機械学習技術を使用して、ロボットが収集した現実世界の触覚観察と、シミュレーションプロセス中に作成された一連の接触を照合しました。
基本的に、この研究者グループによって開発された方法は、物体の3次元形状に基づいて連絡先情報をモデル化することができます。その結果、物体の徹底的な調査中に収集された事前の触覚データは必要ありません。これにより、ロボットの触覚センサーの最初のタッチから物体の姿勢推定値を生成できます。
続きを読む
地球は20年で臨界温度に達するでしょう
中絶と科学:出産する子供たちに何が起こるか
気候変動を恐れない植物に名前が付けられ、10億人がそれを餌にしています