MITの研究者は、高い性能を備えたロボットアームを開発しました。
開発はロボットの指に基づいています。柔らかい外層に囲まれた硬い骨格。研究者らは、指の内側に、透明なシリコンの「皮膚」の下に埋め込まれたいくつかの高解像度の GelSight センサーを配置し、断面画像を提供しました。カメラと 3 つの LED を使用して物体の形状に関する視覚情報を収集し、指の全長に沿って継続的に読み取ります。
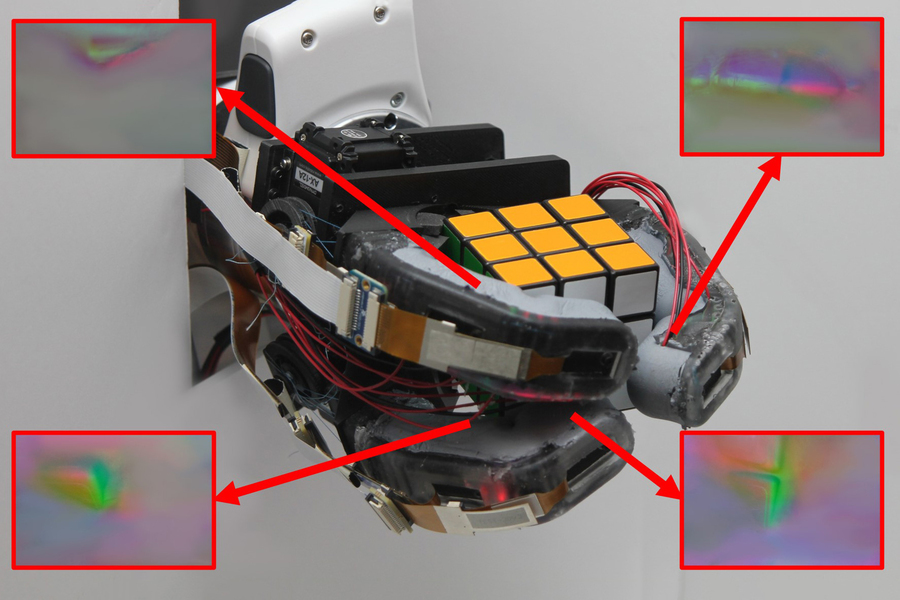 各指には 2 つのクロスビュー カメラと 6 つの LED があります。画像: MIT ニュース
各指には 2 つのクロスビュー カメラと 6 つの LED があります。画像: MIT ニュース
指で物体を掴むと、カメラがその様子を捉えます。カラーLEDが肌を内側から照らすイメージ。柔らかい肌に現れる照明された輪郭を使用して、アルゴリズムは逆計算を実行して、捕捉されたオブジェクトの表面に輪郭をマッピングします。研究者らは、カメラからの生の画像データを使用して物体を識別する機械学習モデルをトレーニングしました。
最も代替的なロボット研究者らは、グリッパーは指先に取り付けられた強力なセンサーを使用していると指摘しています。したがって、識別するには物体がそれらに完全に接触している必要があります。他の設計では、指全体に分散された低解像度のセンサーが使用されますが、それほど詳細は捕捉されません。どちらのオプションでも、アイテムを分析するには複数のキャプチャが必要です。
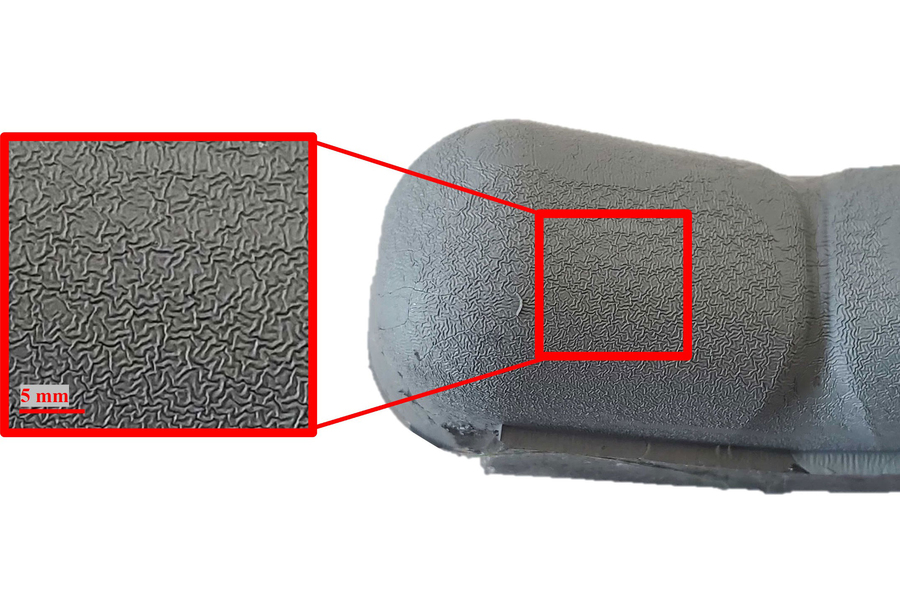 シリコーンの表面にある小さな「しわ」により、指が物体の表面を滑りやすくなり、識別しやすくなります。画像: MIT ニュース
シリコーンの表面にある小さな「しわ」により、指が物体の表面を滑りやすくなり、識別しやすくなります。画像: MIT ニュース
研究によると、新しいデバイスは1 回のキャプチャでさまざまなオブジェクトを最大 85% の精度で識別できます。同時に、硬い骨格により、ドリルなどの重い物体を持ち上げるのに十分な指の強度が得られます。また、柔らかい革を使用しているため、空のペットボトルなどの柔軟な物体を押しつぶすことなく、しっかりと握ることができます。
この取り組みにおける私たちの目標は、私たちの人間の手を非常に優れたものにするすべてのものを組み合わせて、他のロボットの指が現在処理できないタスクを実行できるロボットの指を作成します。
Sandra Liu、研究共著者、MIT 大学院生
続きを読む:
光合成は科学者が考えていたようには機能しないことが判明しました。今、彼らはそれをハッキングしたい
遠方の電波銀河は、地球に直接向けられたブラックホールであることが判明しました
体重と血糖値を下げる方法を見つけました。科学者は手術の効果を約束します
表紙画像: MIT ニュース