 アメリカのエンジニアがBluebotロボットフィッシュを作成しました。彼らは傾いて泳ぐことさえできます。
アメリカのエンジニアがBluebotロボットフィッシュを作成しました。彼らは傾いて泳ぐことさえできます。
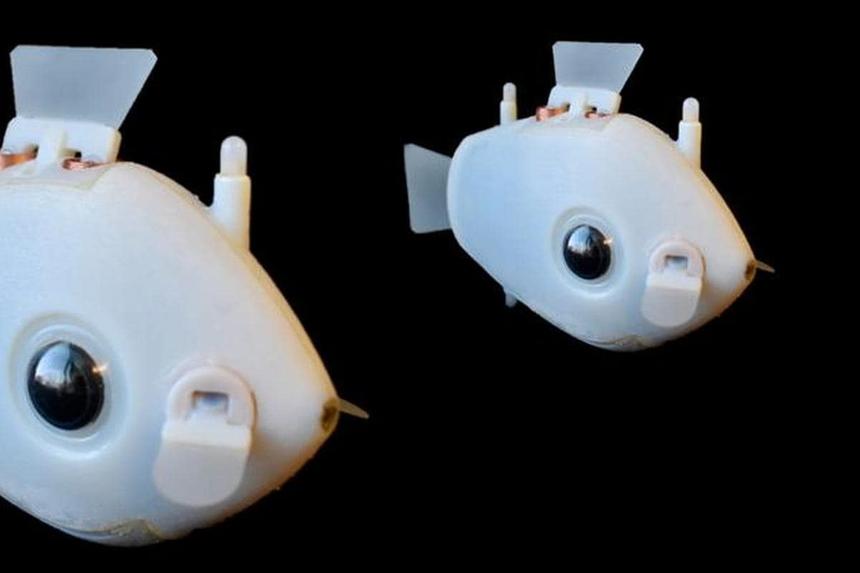
ロボットフィッシュの体長
10センチくらいです。水中では非常に機動性があります。さらに、開発者は魚の群れを管理できない場合があります。学校内のすべてのミニロボットは、視覚情報に基づいて独立した意思決定を行います。内蔵カメラを通じて画像を受信します。また、ロボットの本体には LED マーカーが組み込まれており、「魚」がお互いを識別するのに役立ちます。カメラからの画像は、Raspberry Pi Zero W オンボード コンピューターで処理されます。