カリフォルニア大学バークレー校工学部(バークレー工学)の研究者らが発表した。
海ガニを見ていると、もしかしたら地下掘削は単純なプロセスのようです。しかし、動物が深く掘れば掘るほど、「粒子」がはじかれ、掘削が困難になる、と装置の作成者は説明しています。
ロボット - 海のカニ。ビデオ: バークレーエンジニアリング
この問題を克服してディガーを作成するには研究チームは、ロボットの脚が異方性の力に反応するように設計しました。これは、彼らが他の方向よりも一方向にはるかに大きな力を経験することを意味します.水泳選手のように、このロボットの柔らかい布製の脚は、「ストローク」中に非常に力を入れて拡張し、折りたたんで本体に格納します。
2番目の問題は、汚染とからの除去でした。砂粒の侵入による建物のメカニズム。科学者はまた、Emerita Analoga でその解決策を見つけました。エンジニアは、モグラのカニの関節膜に似たクチクラを作成しました。関節の開口部を裏打ちする、柔らかく柔軟な素材です。穀物が内部に入るのを防ぎますが、同時にロボットの自由な動きを可能にします。
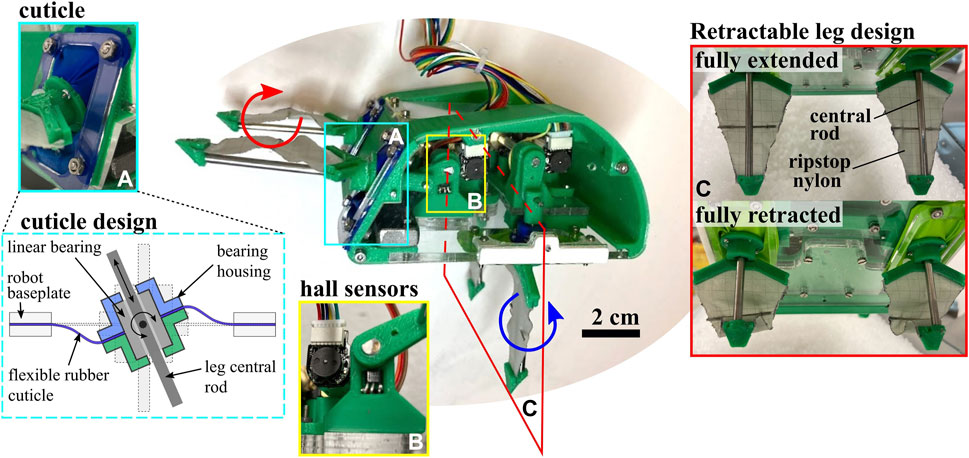 ロボット装置。画像:バークレーエンジニアリング
ロボット装置。画像:バークレーエンジニアリング
地下を探索できるロボット幅広い産業や研究分野でご利用いただけます。例えば、農地候補地の土質測定、工事前調査、海底調査などです。
続きを読む:
ノードストリームからのガス漏れが宇宙から示された
太陽系の端で見つかった珍しい構造。ボイジャーだけがそこにいました。
木星と月が夜空に近づいた様子を見る