韓国科学技術院の技術者が4本足のロボットを設計・製作した
シリーズのスパイダーマンに触発されたロボットMARVELコミックは、動きに電磁石と磁気エラストマーを使用しています。これらは、磁性粒子が点在するゴム状物質で構成されるハイブリッド材料です。磁力のオンとオフを切り替えることで、ロボットは片足で壁の垂直点にしがみつき、残りの足が動いている間に保持して、次のステップに進むことができます。
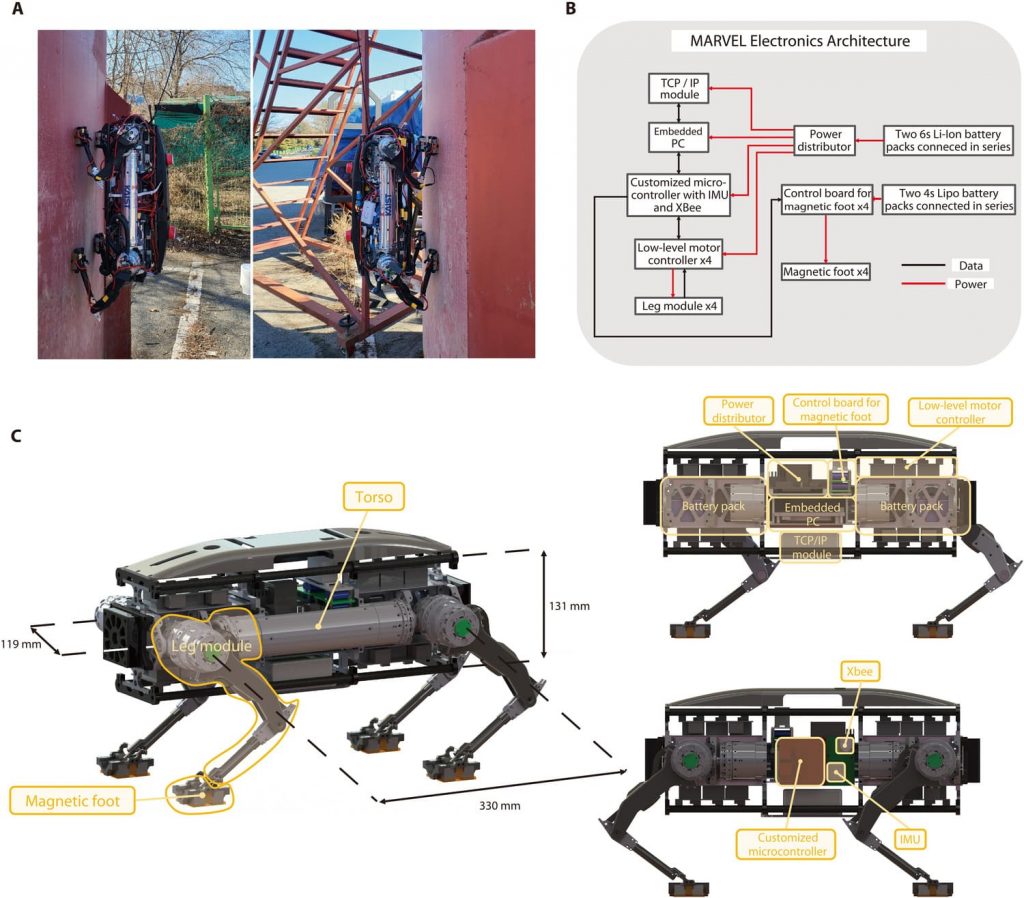 四足歩行ロボットMARVEL。画像: Seungwoo Hong et al., Science Robotics
四足歩行ロボットMARVEL。画像: Seungwoo Hong et al., Science Robotics
ロボットが壁に沿って移動できるように垂直面では、エンジニアはロボットに障害物を避けるように教えることでロボットをプログラムしました。これを行うために、彼は猫の行動に似た技術を使用しています。ロボットは前進する前に表面を「テスト」し、後ろ足を動かす前に前足で小さな最初の一歩を踏み出します。
4 本足の MARVEL ロボットが戦車に乗り込みます。ビデオ: Seungwoo Hong et al., Science Robotics
研究所での試験ロボットが金属の壁を登ったり、天井を歩いたりできることを示しました。さらに、彼はテストに合格し、油性物質を保管するための錆びたオレンジ色の壁のある古いオープンタンクに登ることができました。
ロボットは構造物をよじ登っただけでなく、十分な金属がない場所をうまく克服し、障害物を迂回しました。この研究では、最大 3 kg のペイロードを運ぶことができることが示されました。地形に応じて可変速度で移動し、適切な場所で最大 0.7 m/s まで加速します。
4本足ロボットMARVELが荷物を持ち上げます。ビデオ: Seungwoo Hong et al., Science Robotics
続きを読む:
水素エネルギー、防寒素材、COVID-19 に対抗する生物添加剤:科学者が北で生み出しているもの
科学者たちは、恐竜の死から誰が恩恵を受けたかを発見しました
宇宙から見た地球の写真を見てください。これは最初のプライベート モジュールによって作成されました。