ソフトロボットとは?
ソフトロボティクスは、以下を扱うロボット工学の特定の分野です。
ソフトロボティクスは主に依存しています生物がどのように動き、環境に適応するか。硬い材料で作られたロボットとは異なり、ソフトロボットは、タスクを実行するための柔軟性と適応性が向上し、人と作業するときの安全性も向上します。これらの特性により、医療や産業での使用が可能になります。
ソフトロボティクスは主に設計完全に柔らかい素材で作られたロボット。その結果、結果として得られるロボットは、ワームやタコなどの無脊椎動物のように見えます。このようなロボットの動きをシミュレートすることは難しい作業です。事実、そのようなプロセスには、連続体力学の方法を適用する必要があります。これが、ソフトロボットが連続体ロボットと呼ばれることがある理由です。
思い出してみましょう、連続力学 - セクション力学、連続体物理学、凝縮物体物理学。気体、液体、変形可能な固体の動き、およびそのような物体における力の相互作用に特化しています。
ソフトロボットとハードロボットのハイブリッド
科学者は生物現象を研究するために、生物をイメージしたソフトロボットを作り、実際の生物では難しい実験を行っています。
ただし、スネークロボットなど、連続変形も可能なリジッドロボットもあります。
柔らかい構造はの一部として使用することができますより大きな剛性ロボット。オブジェクトをつかんで操作するためのロボットソフトエフェクターには利点があります。重要なのは、壊れやすいオブジェクトを破壊しないということです。
ハイブリッドソフトハードを作成することも可能です内部の剛性フレームと外部のソフト要素を備えたロボット。ソフトエレメントには多くの機能があります。動物の筋肉に似た作用メカニズムと、人間との衝突時の安全性を確保するためのクッション材の両方です。
 柔らかい脚と地面を移動する機能を備えた車輪付きロボット。
柔らかい脚と地面を移動する機能を備えた車輪付きロボット。
写真:アリ・サデギ、アレッシオ・モンディーニ、エマヌエラ・デル・ドットーレ、アナンド・クマール・ミシュラ、バーバラ・マッゾライ
柔らかいロボットはどんな形にも曲げることができます形状。ナノマテリアルを含む非常に柔らかい素材で作られています。これにより、筋肉などの人間の体の一部に似たものになります。実際、これらのロボットはナノマテリアルの助けを借りて、ほぼ生命を吹き込まれつつあると言えるでしょう。
ソフト ロボットの分野では多くの研究が行われていますが、エンジニアはまだその旅の始まりにすぎません。しかし、専門家は、2024 年までに市場は 21 億 6,000 万ドルに達すると予測しています。
ソフトロボットは通常のロボットとどう違うのですか?
金属ロボットははるかに制限されています。スピードと精度を念頭に置いて製造されているため、組立ラインの作業などに最適です。しかし、それらはそれほど普遍的ではありません。
ソフトロボットは産業用または産業用とは異なります協働ロボットは、その構造が柔らかくしなやかな素材でできているという点で。それらの設計は他の形態のロボットとは大きく異なり、同様にソフトロボットは非常に異なる機能を実行します。
ほとんどのソフトロボットはまだ開発の初期段階で、最初のソフトロボットは2011年にハーバード大学のジョージホワイトサイズ教授によって開発されました。それ以来、ソフトロボットの数と種類は劇的に増加しました。それらは実際の商業的実行可能性から数年離れているかもしれませんが、それでも大きな可能性を秘めた刺激的な技術を表しています。
ソフトロボット-世界のエキサイティングなイノベーションロボット工学。上記の5種類のソフトロボットは、現在開発されているすべての種類のソフトロボットの中で最大の商業的可能性を秘めている可能性があります。
産業用ロボットや協働ロボットとは異なり、ソフトロボットはさまざまなアプリケーションに対応します。
ソフトロボットはどのように使用されますか?
ソフトロボットの魅力は、その柔軟性と汎用性にあります。
6つの有望なタイプのソフトロボット
ソフトロボットにはさまざまな種類がありますが、最大の商業的可能性を約束する6つの異なるアプリケーションがあります。
- ロボットの筋肉: 現在数種類を開発中ロボットの筋肉として機能するソフトロボット。最も有望なプロトタイプの 1 つは折り紙からインスピレーションを得ています。その折り畳まれた構造は、自重の 1,000 倍を持ち上げることができ、長さは数ミリメートルから 1 メートルまで拡大できます。さらに、科学者たちは現在、DNA からナノスケールのロボットを作成することに取り組んでいます。
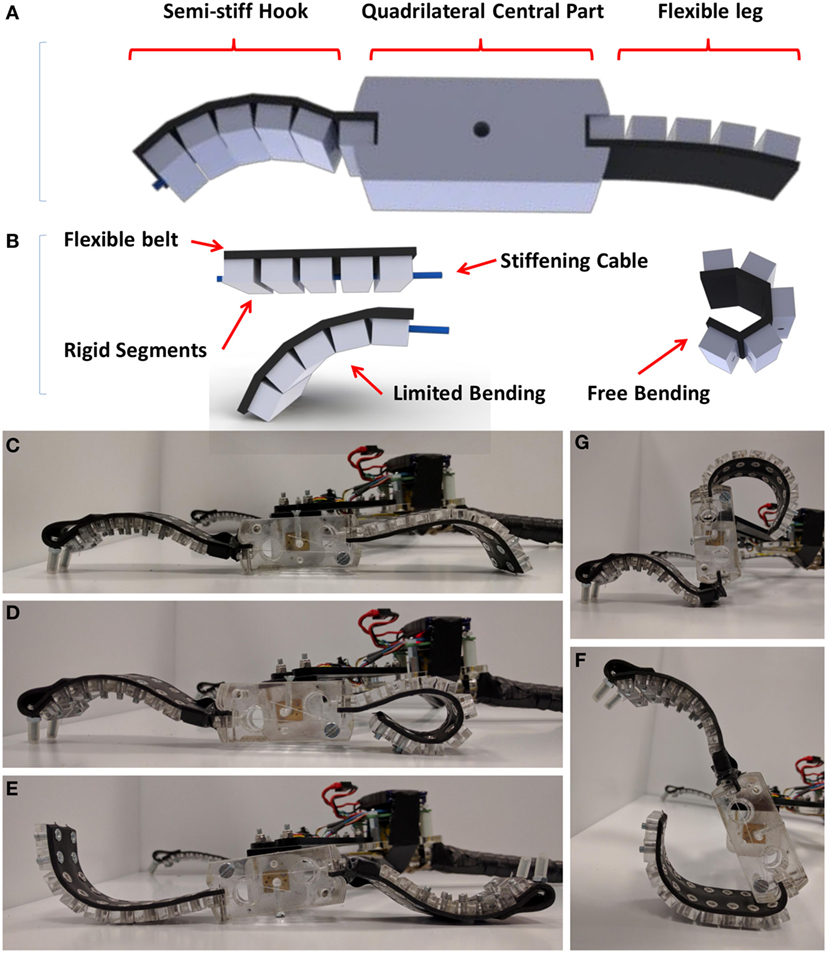
- 登山ロボット:これらのタイプのロボットには多くの可能性があります建物の検査やメンテナンスから捜索救助活動に至るまでのアプリケーション。ソフトクライミングロボットの1つのバージョンは、毛虫に非常によく似た湾曲したデザインを持っています。これにより、彼はさまざまなサイズの構造物を上下に這うことができます。
- 食用ロボット。そんなロボットの初プロジェクト 毎年恒例のソフトロボティクスコンテストのためにフィラデルフィアの学校チームによって作成されました。これらの生分解性ロボットは、体のさまざまな部分に薬を安全に届けることができます。
- ウェアラブルロボット。これらの生体模倣装置は身体的リハビリテーションを受けている患者。ソフトロボットは、どこにいても体の自然な動きを模倣し、患者が正常な運動機能を取り戻すのを助けます。
- 義肢ロボット。ソフトロボットは次のようなものを作ることができます。手足や体の一部を失った人々のための優れた義肢。多くの場合、物体をより繊細かつ正確に把握するために、ソフト ロボット技術が義手の先端で使用されます。
- 宇宙飛行士ロボット。NASA の科学者は、いつか火星の表面を飛行するようになるだろうと示唆しています。人体の最も手の届きにくい部分で動作するロボットをすでに設計している企業もいます。
ソフトロボットは産業環境-特に人間と連携する協働ロボット(「コボット」とも呼ばれます)として、それらはそれに限定されることはほとんどありません。
世界初のソフト自律型ロボット
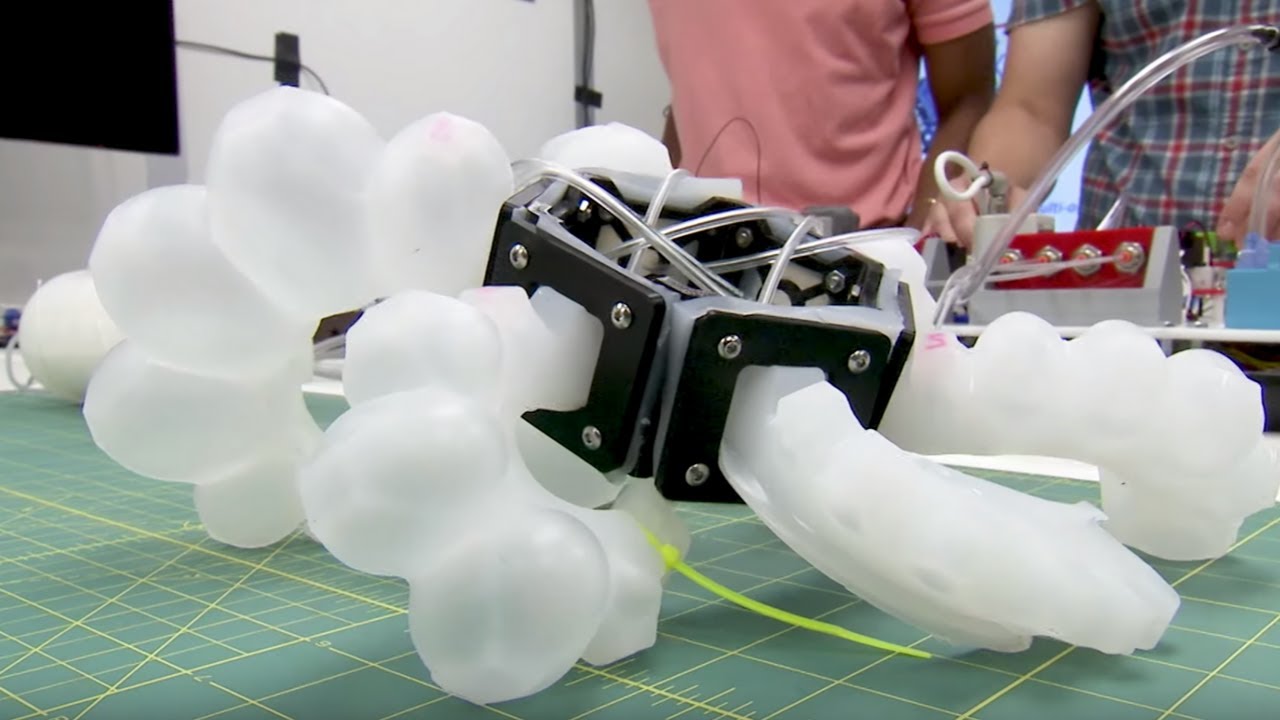
2016 年、ハーバード大学の科学者は世界初のソフト自律ロボット、Octobotの開発に使用された液体シリコーンゴム。タコからインスピレーションを得たこれらの柔らかいロボットは、「ターミネーター」や「スター・ウォーズ」に描かれているような鋭く硬い金属製のロボットでは不可能な、回転して障害物を乗り越えることができます。
驚いたことに、Octobotは製造コストが安いですが、ラテよりも、給油に5セントしかかかりません。現場を調査し、障害物やボトルネックを克服して救助活動を支援するために、何百もの安価なソフトロボットが送られていることを想像できます。
「ソフトロボティクスの主な目標は、作成することではありません超精密機械は、すでに持っているので」と、生物医学エンジニアのJadaGerboniは2018年のTEDトークで述べました。 「そして、ロボットが現実世界の予期しない状況に耐えられるようにすること。」
医学におけるソフトロボット
ソフトロボットは外科用および医療用器具(特に内視鏡)。それらの利点は、従来の器具よりも簡単に体の構造を移動できることです。これにより、医師は検査したい患者の体の領域をより明確に把握できます。
ソフトロボティクス向けの新しい柔軟で軽量な電源システムの開発により、人々が動き回るのを助けることができる完全にソフトなロボット衣類は、現実に一歩近づきました。
ブリストルのチームによって発見された大学は、障害を持つ人々や加齢に伴う筋肉変性に苦しむ人々のためのウェアラブル補助装置への道を開く可能性がある。この研究は本日、サイエンスロボティクス。
 新しいスリムで軽量なクレジットカードサイズのポンプ。クレジット:Tim Helps、ブリストル大学。
新しいスリムで軽量なクレジットカードサイズのポンプ。クレジット:Tim Helps、ブリストル大学。
ソフトロボットはしなやかな素材でできており、伸びたりねじれたりすることがあります。これらの材料は、空気が送り込まれると収縮する人工筋肉を作るために使用できます。これらの筋肉の柔らかさは、支えとなる衣服の使用を可能にします。しかし、これまで、これらの空気圧人工筋は、かさばり、ノイズが多く、複雑で高価な従来の電磁(モーター駆動)ポンプによって駆動されてきました。
ブリストルソフトラボの研究者ロボット工学のジョナサン・ロシター教授が率いるブリストル・ロボティクス研究所は、柔らかく、柔軟性があり、安価で、製造が容易な新しい電空ポンプの実証に成功しました。
記事では、チームは新しいソフトがどのようにクレジットカードサイズのポンプは、浮き袋とポンプ液で人工筋肉を駆動できます。チームはまた、強力な服を実現するための次のステップの概要を説明しています。
同様に、炭素ベースのチタンポリマー合成ポリマーと組み合わせて使用すると、極薄の人工筋肉を作成できます。この技術は、韓国先端科学技術研究所で、踊る蝶、羽ばたく葉、咲く花の芸術複製で実証されています。
ソフトロボットはどのように機能しますか?
専用に設計されたソフトロボット生命の模倣は、移動したり他のタスクを実行したりするときに、しばしば周期的なストレスにさらされなければなりません。たとえば、上記のヤツメウナギやイカのようなロボットの場合、移動するには水の電気分解とガスの点火が必要であり、ロボットを前進させるために急速に膨張します。この反復的で爆発的な膨張と収縮により、選択したポリマー材料に強い周期的負荷がかかります。エウロパの水中ロボットは修理や交換がほぼ不可能であるため、疲労亀裂の発生と伝播を最小限に抑える材料と設計を選択するように注意する必要があります。特に、材料は、耐久限度または応力振幅周波数を使用して選択する必要があります。この周波数を超えると、ポリマーの疲労特性が周波数に依存しなくなります。
ソフトロボットはソフトでできているので材料、温度の影響を考慮に入れる必要があります。材料の降伏応力は温度とともに減少する傾向があり、高分子材料ではこの効果はさらに顕著です。室温以上では、多くのポリマーの長鎖が互いに伸びたり滑ったりして、1つの領域に局所的な応力が集中するのを防ぎ、材料をプラスチックにします。しかし、ほとんどのポリマーは延性から脆性への転移温度を経験し、それを下回ると長鎖がこの延性のある方法で反応するのに十分な熱エネルギーがなく、破壊される可能性がはるかに高くなります。高分子材料が低温で脆くなる傾向は、チャレンジャー号のシャトル災害の原因であると考えられており、特に医療に導入されるソフトロボットの場合は、非常に真剣に検討する必要があります。延性から脆性への転移温度は、「低温」と見なすことができるものである必要はなく、実際には、結晶化度、靭性、側鎖サイズ(ポリマーの場合)およびその他の要因に応じて、材料自体の特性です。 。
テクノロジーのデメリット
ソフトロボットにも欠点がないわけではありません。具体的には、科学者らは、流体アクチュエーター(ロボットを実際に動かすデバイス)の作動が遅いことを発見しました。これは、動作に必要な流体の量が膨大であるため、または流体の流れがデバイス内のさまざまな構造(チューブやバルブなど)によって遅くなっているためです。 )。
しかし、ハーバードの研究者は開発中です回避策。このようなおもちゃを曲げると大量のエネルギーが放出されることに注意して、2つの格納式カバーを備えたアクチュエータを設計します。アウターキャップが膨らむと、インナーキャップに対する圧力が上昇します。それが曲がると、エネルギーの放出がデバイスを動かします。
ソフトロボットにはその可能性があります火星にまで広がり、火星に戻って、彼らは間違いなく今後数年間で社会の大部分になるでしょう。それらの能力は、人間の想像力によってのみ制限されます。
ソフトロボットと人間
ソフトボディロボットは、人間とロボットの間の社会的および触覚的な相互作用。これには、不適切な感情的愛着の可能性、およびユーザーの個人的および社会的に破壊的な行動を慎重に検討する必要があります。人間とロボットの相互作用に関連する倫理的問題、およびそれらが社会的相互作用のコンテキストでソフトロボティクスの設計にどのように貢献すべきかについては、ジャーナルSoftRoboticsの記事で説明されています。
タフツ大学のトーマス・アーノルドとマティアス・ショイツ、マサチューセッツ州メドフォードは、「ソフトロボティクスの触覚倫理:人間とロボットの相互作用のためのインテリジェントデザイン」というタイトルの記事を共同執筆しました。彼らは、ソフトロボットが環境に触れて相互作用する能力、ロボットとの一方通行の人間の感情的なつながりを形成する潜在的なリスク、ソーシャルロボットの設計対象など、幅広いトピックを調査します。ソフトロボティクスに関連する倫理的問題のいくつかと社会への潜在的なリスクを説明するために、著者はセックスロボットの例について説明します。
アーノルド博士とショイツ博士は、3つの一般的なことを示唆しています社会人とロボットの文脈でソフトロボティクスを開発する原理。彼らは、ソフトロボティクスコミュニティが人間とロボットの相互作用の質と効率を改善する方法としてこれらの倫理的問題に取り組むことを奨励しています。 「ソフトロボット技術により、人間と直接対話する機械が間もなく登場します。彼らが社会的状況に与える影響について考え始めることが重要です。この論文は、いくつかの主要な問題の概要を説明し、人間とロボットの関係について真剣に議論するための優れたガイダンスを提供します」と、マサチューセッツ州メドフォードのタフツ大学で神経力学および生体模倣装置の研究室を運営するバリーA.トリマー博士は結論付けています。 。
また読む
世界の最初の正確な地図が作成されました。他のみんなの何が問題になっていますか?
惑星状星雲のハッブル写真を見てください。
物理学者はブラックホールの類似物を作成し、ホーキングの理論を確認しました。それはどこにつながるのですか?