米国のマサチューセッツ工科大学の科学者は、次のことができるロボットチーターを作成しました。
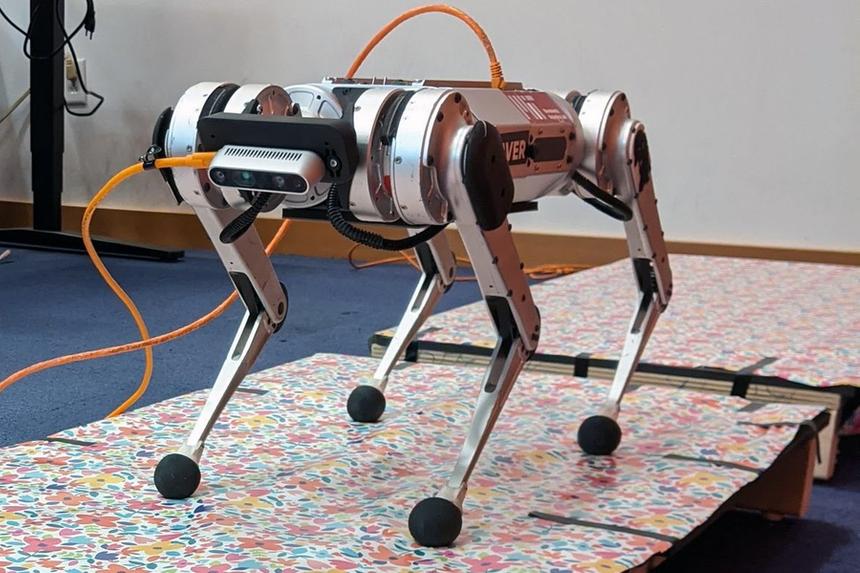
受け取ったロボットにインストールされた開発者「ミニチーター」という名前は、隙間や同様の障害物を飛び越えることができる新しいインテリジェントシステムです。これが開発の主な価値です。
研究の筆頭著者によると、MITのコンピューターサイエンス教授であるGabrielMargolis氏は、このシステムは、亀裂や穴などの潜在的な障害物やその他の平面障害物をリアルタイムで検出し、チーターがどのように反応するかについての指示に変換するビデオセンサーに依存しています。
ロボットスマートコンピュータビジョンシステムチーターロボットの12の関節すべてを制御する低レベルのコントローラーにターゲット軌道を提供するニューラルネットワークにデータを送信することにより、接近する地形の深さを推定します。
「これの使用を含む階層低レベルのコントローラーを使用すると、ロボットの動作をより従順に制限できます。この低レベルのコントローラーでは、制約を課すことができる明確に定義されたモデルを使用します。これは通常、学習ネットワークでは不可能です」とMargolis氏は述べています。
出典:未来派