エンジニアたちは、探査車が火星から収集したサンプルを収集するロボットアームを開発している。
マニピュレータのアーキテクチャは人間を模倣しています肩、肘、手首の腕。さらに、ロボットには独自の「脳」と「目」が組み込まれています。 ESAは、腕が7自由度で広範囲の動きを実行できると報告しています。高レベルの器用さにより、火星から発射する前に、手でローバーからチューブを取り外し、火星の土壌から持ち上げ、コンテナに挿入し、蓋を閉じることができます。
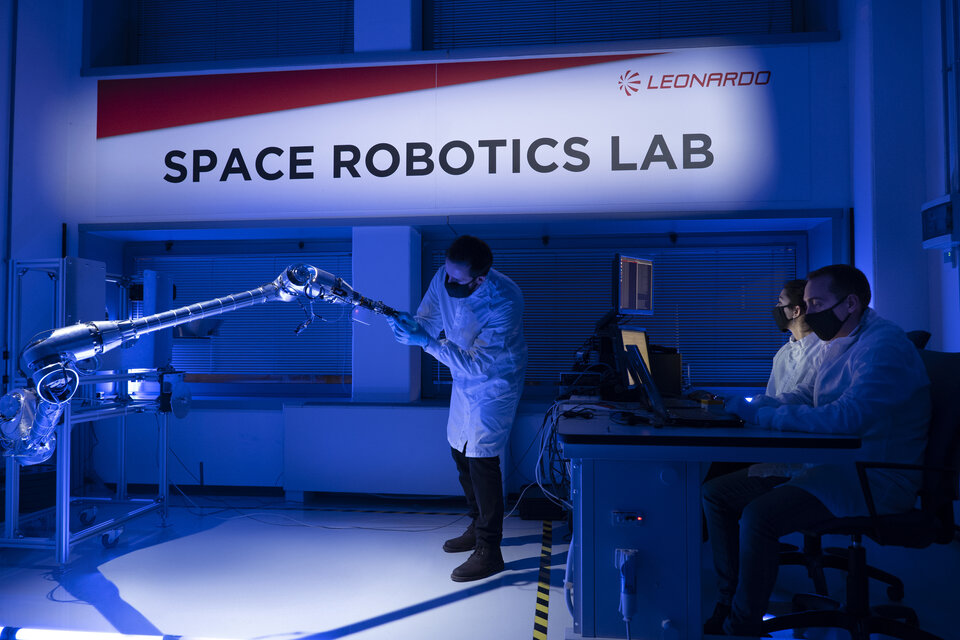 火星ミッション用のロボットアーム。写真:Leonardo / Maxon / GMV / OHB Italia / SAB Aerospace s.r.o
火星ミッション用のロボットアーム。写真:Leonardo / Maxon / GMV / OHB Italia / SAB Aerospace s.r.o
ロボットには2台のカメラと複数のセンサーが装備されます。これらのデバイスを使用すると、彼は独立して最善の行動方針を決定し、それに応じて動きを調整することができます。
ロボットアームは、火星サンプルリターンミッションの一部です。これは3つの部分で構成され、2033年までに赤い惑星で収集されたサンプルを地球に持ち込むことを目的としています。
 マーズサンプルリターンミッションの概略図。画像:EKA
マーズサンプルリターンミッションの概略図。画像:EKA
ローバーが必要なサンプルを収集した後、彼は発射台に戻ります。マニピュレーターの助けを借りて、収集された土壌はコンテナにロードされ、密閉されます。ロボットがコンテナの蓋を閉め、火星のサンプルが軌道に打ち上げられます。そこで、それらはESA Earth Return Orbiter(ERO)によってピックアップされ、地球に材料が返送されます。
表紙画像:Leonardo / Maxon / GMV / OHB Italia / SAB Aerospace s.r.o
続きを読む:
物理学者は、宇宙に普遍的な「時計」を発見しました。それらは、原子よりも正確です。
考古学者は、頭が巨大な不気味な人々の絵を見つけました:彼らは誰でしたか
ジェイムズウェッブ望遠鏡は木星の最初の写真を撮りました:それは一度に9つの動くターゲットを示しています