ロボットとは誰ですか?
数年前、素晴らしいものがRedditに登場しました - 科学者は複雑さを説明しました
ロボット工学は相乗的に適用されます活動の場所。プログラミング、メカトロニクス、サイバネティックスで構成されています。メカトロニクスは、現実の世界と相互作用するものです。そして、サイバネティックスはマルチリンク科学であり、まず第一に、作成されたプログラムの管理が含まれます。
ロボットとは?15年前は、これは工場で動作し、溶接や塗装を行うロボットアームだと多くの人が言っていたでしょう。もう1つの人気のある答えは、映画界のアンドロイドロボットです。しかし、移動するカートや無人機はロボットですか?はい、これもロボット工学の分野の1つです。航空機もロボットであり、最新の開発のいくつかにはインテリジェントテクノロジーが含まれており、実際には自律型ロボットです。
 モバイルカートもロボットです
モバイルカートもロボットです
フィールドのようなロボット工学の分野もありますロボティクス-「モバイルロボティクス」。これには、フィールド、建物、または水中を移動するすべてのロボットが含まれます。私の意見では、最も興味深いアプリケーションは農業です。
航空機の歴史
航空機の歴史は過去に始まりました世紀。それまでは、エンジンのない気球しか飛ばず、ロボットと呼ぶのは難しかったです。前世紀の初めには、飛行船と飛行機の2種類の航空機が機能していました。最初の制御された飛行はライト兄弟によって行われました。さらに、最初の自動操縦装置は非常に迅速に登場し、そのほぼ10年後、飛行を安定させるのに役立ちました。
ロボット工学の現在の方向性はPixHawkなどの新しいオープンオートパイロットの開発と可用性(PixHawkは、コントローラー、ドローン、その他のUAV用のオープンハードウェアです。学術、アマチュア、および専門的な目的で使用されます)。すべての人の生活の中でドローンが到着した例は、DodoPizza社とCoptExpressによるピザの配達です。これは2014年に発生しました。
 航空機の歴史
航空機の歴史
ドローンの制御方法
現代の航空機は1つを使用します揚力を作成するための3つの原則の1つ-空気静力学、ジェットまたは空気力学。飛行の空力原理と揚力の生成(空気の一部を投げる)は、固定されたベアリング面(翼)を備えた装置全体の動き、または個々のベアリング部分の動きのいずれかによって実装できます。空気に対する装置(メインローター、ファン)の。
 デバイスの飛行方法
デバイスの飛行方法
ドローンには揚力を生み出すプロペラがあります。地面から離れると、デバイスはプロペラをより速く動かし始め、上昇します。しかし、作用力は反力と同じです。プロペラが回転すると、反対方向にモーメントが発生します。これがヘリコプターとヘリコプターの設計です。ヘリコプターにプロペラが1つあると、安定しなくなります。したがって、デバイスは2ローター方式またはテールローターのいずれかを使用します。
クワッドコプターは非常にシンプルなデザインです-通常、4本のネジがあり、そのうち2本は一方向に回転し、2本は他の方向に回転します。ユーザーが前進する必要がある場合、一部のプロペラは遅く回転し、他のプロペラは速く回転します。また、ユーザーが回転したい場合は、斜めに配置されたネジの中には加速するものもあれば、減速するものもあります。
 クワッドコプターが飛ぶ方法
クワッドコプターが飛ぶ方法
コーナーでのヘリコプターの動きは、コーナーに沿った動きに関連していますコーディネート。パイロットが前に進みたい場合は、まずドローンを前方に傾け、次に電動装置が前方に引っ張られるにつれて、停止したい位置でドローンを安定させる必要があります。
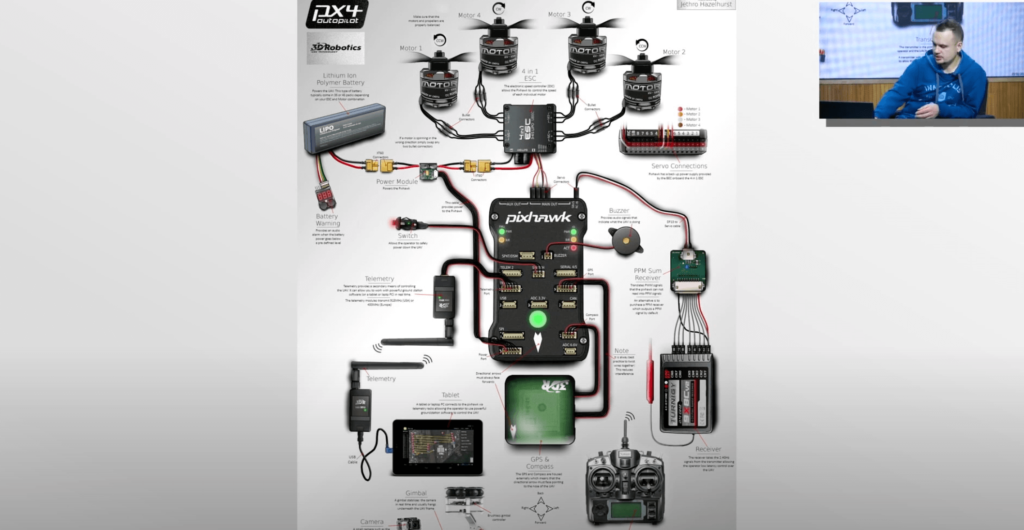
これは、最も人気のある自動操縦装置の1つである図です。これに基づいて、新しいデバイスを作成できます。すべてのモーターとセンサーに接続します。さらに、モーターには独自の制御ユニットであるESCレギュレーター(モーターの速度を制御する電子速度コントローラー)があります。
センサーの中には、ドローンができるようにGPSがあります屋外で作業し、ポイントに飛んで、位置を安定させます。しかし、オートパイロット自体の内部にはIMUもあります。これは、姿勢角を決定できる慣性センサーモジュールです。通信チャネル、地上管制局、バッテリーもあります。
 UAVデバイス
UAVデバイス
上記のように、レベルがありますエンジン制御-私たちはためらうことなく、回転速度を設定することができます。残りのレベルは同じ原理で機能します。次のレベルは方向制御です。
しかし、最初に回転速度を制御する必要があります-FPVコプターはこのレベルで飛行します(一人称からドローンのカメラからリアルタイムで写真を見ることができるデバイス(FPV-一人称視点)。経験豊富なパイロットが回転速度を設定し、ジョイスティックで常に操縦します。次のステージは、ユーザーが角度を安定させることができるが、ドローンはまだ移動するときです。次は速度制御であり、最高は位置制御であり、ポイントに移動するか、特定の軌道に沿って移動するように操作します。
プログラム、構築、ドローンの制御-PIX4オープンソースの自動操縦に注意を払う必要があります。空中ロボティクス(ROS-ロボットオペレーティングシステム、またはオープンロボティクス)の周りにはコミュニティ全体があり、ドローン用のシミュレーターがあります。したがって、ドローン自体がなくても、シミュレータで多くの実験を行うことができます。
ドローン開発段階
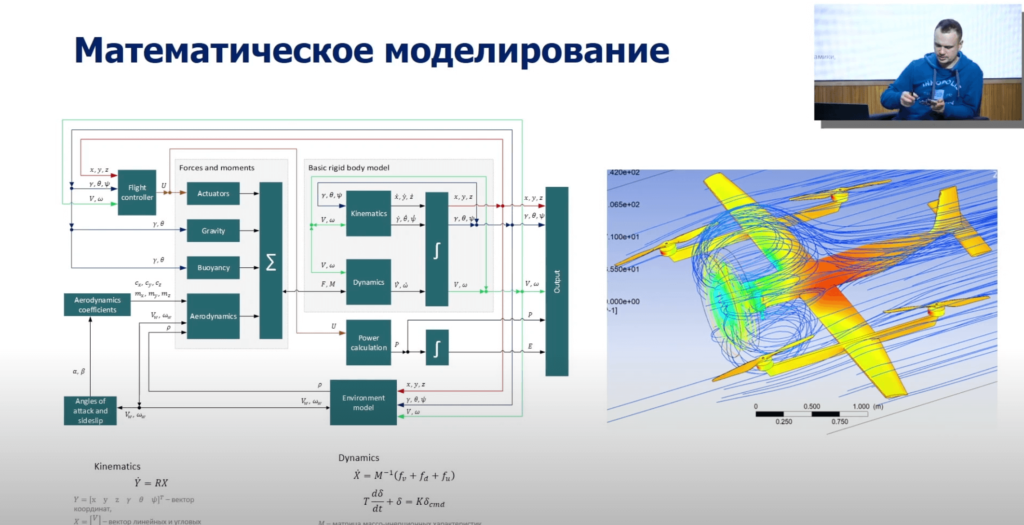
研究者は概念的なところから始めるモデリングを行った後、装置の正確なモデルを構築する必要があります。公式には立ち入りませんが、コプター モデルは本質的に剛体モデルです。これは粒子系に拡張されたニュートンの第 2 法則です。並進運動と回転運動があり、運動の運動学と力学があり、特定のデバイスのモデルを説明するには、特定のドローンに作用する力の方程式をここに追加する必要があります。
 UAVのモデル化方法
UAVのモデル化方法
次のステップは、システムを開発することです管理。古典的な方法で行う場合:最初に正確な数学的モデルを見つけ、それに基づいて、制御アルゴリズムまたは新しい式をすでに合成します。制御システムには、動作計画、環境認識、センサーを使用した状態推定など、すべてのレベルを含めることができます。アルゴリズムを使用すると、座標とデータを調整できます。
 ドローン制御システム
ドローン制御システム
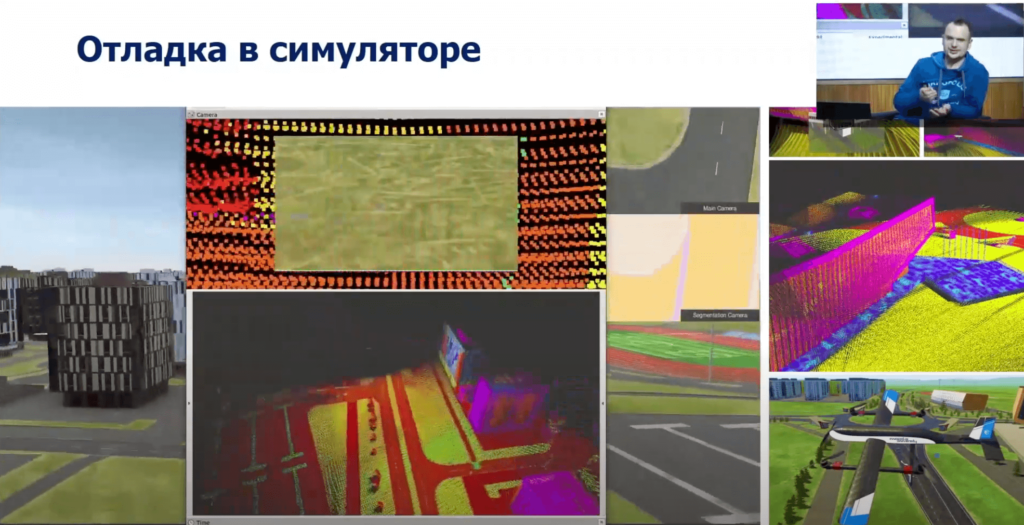
制御アルゴリズムがあればすぐに実現可能申請しますが、申請するとかなりの費用がかかります。デバイスはほんのわずかなエラーでクラッシュします。これを考慮してバックアップを作成する必要があります。シミュレータはテストに使用されます。
以下はイノポリスのバーチャルツアーですは私たちの大学の製品であり、GitHubからダウンロードできます。これは視覚的なコンポーネントであるだけでなく、デバイスのすべてのセンサーのデータでもあります。すべての位置センサーを備えており、ドローンのように制御され、すべての制御アルゴリズムをデバッグできます。
 ドローンがシミュレーションでどのように学習するか
ドローンがシミュレーションでどのように学習するか
シミュレーターの経験に基づいて表示される場合より自信を持って-ハードウェアの実装に進むことができます。そのコンポーネントをここに示します:カーボンとコンポジットからのデバイスの製造、電子機器の作成、エンジンの配置、それらの固定。
検査は路上では始まりません。まず、デバイスはサスペンションまたは特別なスタンド上でテストされます。これらは、無人航空機の機能の要素をデバッグするために使用できます。たとえば、ここでは垂直離着陸機が示されています。これはコプターと飛行機を組み合わせたもので、ビデオでは外部の妨害にどのように対処し、角度を維持するかがわかります。右側は、5 つのエンジンを同時に点火し、制御システムがそれをどのように処理するかを確認するというかなりクレイジーな実験です。
 ドローンの作り方
ドローンの作り方
テスト後、彼らはフライトに移ります-低速での小さな離陸、操縦できるパイロットによる操縦された動き。最後のコードは完全に無人の飛行です。
装置は垂直に離陸します -「ヘリコプターのように」メインエンジンがオンになり、ドローンが加速して飛行機モードに切り替わり、翼が機能するのに十分な速度が発生します。その後、コンター プロペラがオフになり、飛行機のように飛行します。着陸プロセスは逆の順序で実行されます。
ドローンで何が起こっているのか
現代のタスクの1つ科学者—飛行中の障害物を迂回します。一部のドローンはすでにこれを行う方法を知っていますが、タスクは少し広いです-障害物のある環境でできるだけ速く動くようにデバイスを教える必要があります。そして、アルゴリズムを改善するために努力し、改善する余地がまだあります。
そのようなテストの別の例は、森林。非常に興味深いアプローチがあります。ここでは新しいアルゴリズムだけでなく、センサーも使用されます。イベントカメラです。これは、時間の単位ごとにフレーム間の差を送信する非常に高い周波数のカメラです。これにより、障害物をすばやく制御して対応することができます。
ドローンの動作計画の分野では、競争:誰がそれをより速くするだろう。タスクは、未知の領域をマッピングし、その3次元表現を構築し、その上にオブジェクトを見つけることです。私たちは大学に飛びましたが、物を見つける問題も解決しました。私たちの結果は、既知の公開されたアルゴリズムよりもさらに優れていました。
ドローンのレースには競争があります。パイロットがゴーグルを持っていて、ドローンを制御してゲートをできるだけ速く飛ぶようにすると、カメラ付きのデバイスで作成されます。同じタスクを自動モードで実行する必要がある、非常に壮観なイベント。残念ながら、これまでのところ、コンピューターはチェスでしか人を倒すことができず、ドローンロボットは人間のパイロットを追い抜くことができませんでしたが、進歩はすでにかなり深刻です。マシンビジョンアルゴリズムの助けを借りたドローンはそのようなタスクを実行できます。作業は速度を上げることだけです。
もう1つの競争はMicrosoftGamesofドローン、それはシミュレーターで実行されます。同じ地域で、サウジアラビアの有名な主要な大会の1つが開催されます。参加者は3年前から募集しています。
ドローンショーには無人装置が活用される- これらは今日では花火の代わりとなる素晴らしいイベントです。しかし、グループでの使用はこれだけではありません。より広いエリアを検査することができます。
適用する場合
科学的なものだけに見えないように以下の開発は、Skydioドローンのデモです。現在、これは自律性の点で最も先進的なデバイスです。これは、地図作成、障害物回避、交通計画などの最新テクノロジーが、ユーザーがすでに利用できる製品でどのように併用されているかの一例です。
もう一つの方向性は新しいデザインです航空機。その1つが折りたたみ式ドローンです。このような装置の 1 つは、事故後に検査のために狭い空間に飛行することができます。もう 1 つの例は、展開可能なドローンです。たとえば、狭い空気チューブから飛び出て、通常どおり飛行することができます。
この分野でもプロジェクトがあります-これはソフトテンソドロン。これは飛ぶ最初のソフトシェルドローンです。喜びはあなたがそれを落とすことができて、それが無傷のままであるということです。さらに、ビームの長さ、ケーブルの張力を変更できます。
これから実現する 2 つの例すぐ。まずはドローンを使った配送。ここで、小包ターミナルとドローン着陸ステーションを組み合わせた非常に興味深い実装があります。この場合、ドローンがいつ到着するか、どこに着陸するかを心配する必要がないため、すぐに到着することができます。盗まれる前に時間を見つけて荷物を引き取りましょう。 2番目の例は空飛ぶタクシーです。これは開発の最もエキサイティングな領域であり、すでに動作するプロトタイプがあります。しかし、これが実現するのは今後 10 年以内です。
過去6年間で、飛行タクシーの分野でどのような進展が見られましたか。
-会社「ホバー」は、デバイスを提示しました低ノイズの電気モーターとコンパクトな寸法-車のように。高さ150mまで離陸し、標準の駐車スペースに着陸します。ドローンは2人乗り用に設計されており、最大積載量は300 kg、速度は200 km/hです。
— 2016年、ロシアの企業Hoversurf通常の都市の駐車スペースからいつでも持ち運び、離陸できるホバーバイクを見せてくれました。最高速度は時速100kmに達し、安全上の理由から、吊り上げ高さは強制的に5メートルに制限されています。
— 2018年、エアバスの乗客によって開発されましたAlpha One VTOL航空機は、5メートルの高さまで上昇し、53秒間空中に留まりました。ユーザーは、アプリケーションを介してUAVを呼び出し、市内内外のある地点から別の地点に移動することができます。
— 2020年、CityAirbusエアタクシーが最初の無料フライト。テストは、イルドフランスの街であるパリの郊外で行われました。CityAirbus航空機は、最大120 km / hの速度で、最大30kmの距離を移動できます。飛行タクシーの重量は2.2トン以上で、シティエアバスは助手席3席と運転席1席を備えています。
-2022年、中国の新興企業Pantuo Aviationは、ダクト付きの空飛ぶタクシーのデモンストレーターであるT1を発表しました。時速300km以上の速度で飛行し、航続距離は250kmです。
続きを読む:
宇宙探査機はマーキュリーから200キロ離れたところを飛行しました。彼が見たものを見てください
科学者たちは、ビタミンが癌の発生率にどのように影響するかを明らかにします
人がポルノコンテンツを見ると、中国の読心ヘルメットが警報を鳴らします