케임브리지 대학의 엔지니어들은 인쇄된 부드러운 로봇 팔을 개발했습니다.
연구진은 인쇄된손이 만지는 것을 "느낄" 수 있도록 3D 프린터에 촉각 센서를 이식한 의인화된 손. 손은 손목을 기반으로 한 수동적 움직임만 가능했습니다. "이 디자인의 가장 큰 장점은 액추에이터를 사용하지 않고도 얻을 수 있는 동작 범위입니다."라고 저자는 말합니다.
"수동" 로봇 팔 훈련. 비디오: 케임브리지 대학교
과학자들은 로봇 팔로 1,200회 이상의 테스트를 수행했으며,작은 물건을 떨어뜨리지 않고 집는 그녀의 능력을 보고 있습니다. 처음에 로봇은 작은 3D 인쇄 플라스틱 공을 사용하여 훈련되었고 인간의 시연에서 파생된 미리 결정된 동작을 사용하여 공을 잡았습니다.
로봇은 시행착오를 거쳐어떤 캡처가 성공할지 알아보십시오. 볼 연습을 마친 그는 복숭아, 컴퓨터 마우스, 뽁뽁이 롤 등 다양한 물건을 집으려고 했다. 이 테스트에서 손은 14개 물체 중 11개를 성공적으로 잡을 수 있었습니다.
다양한 크기, 모양 및 질감의 개체 캡처- 사람에게는 간단한 작업이지만 로봇에게는 어려운 작업입니다. 오늘날 대부분의 첨단 로봇은 어린 아이들이 쉽게 처리할 수 있는 조작 작업을 수행할 수 없습니다. 예를 들어, 사람들은 본능적으로 달걀을 들어올리기 위해 얼마나 많은 힘을 가해야 하는지 알고 있지만 로봇에게는 이것이 문제입니다. 충분히 강하지 않으면 물체가 떨어지며 너무 강하면 달걀이 깨집니다.
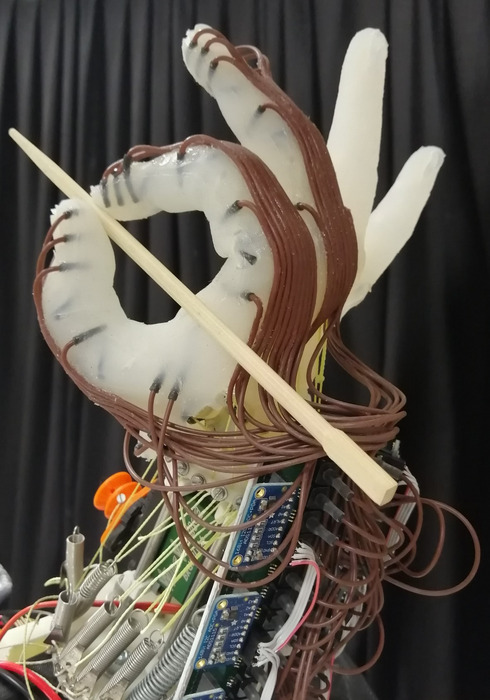 프로토타입 로봇 그리퍼. 이미지: 캠브리지 대학교
프로토타입 로봇 그리퍼. 이미지: 캠브리지 대학교
전동 손가락을 사용한 정교한 기술각 관절에 상당한 양의 에너지와 많은 수의 복잡하고 값비싼 액추에이터가 필요합니다. 엔지니어가 제안한 패시브 그립은 로봇을 훨씬 쉽게 제어하고 훨씬 더 에너지 효율적입니다. 연구원들은 적응 가능한 디자인이 보다 자연스러운 움직임이 가능한 저비용 로봇을 개발하는 데 사용될 수 있다고 믿습니다.
더 읽어보기 :
최고 해상도의 화성 지도 보기: 110,000 프레임 및 5.7조 픽셀
하나의 양성자 내부에 있는 쿼크의 "바다": 기본 입자는 무엇으로 구성되어 있습니까?
허블 당황 과학자의 새로운 이미지
표지: 프로토타입 로봇 그리퍼. 이미지: 캠브리지 대학교