로봇은 움직일 수 있을 뿐만 아니라 물체를 조작할 수도 있습니다. 저자에 따르면 오늘날 수요는
따라서 새로운 논문의 저자는 성능 향상을 위해 다양한 엔드 이펙터를 갖춘 팔다리 메커니즘을 기반으로 한 설계를 제시했습니다.
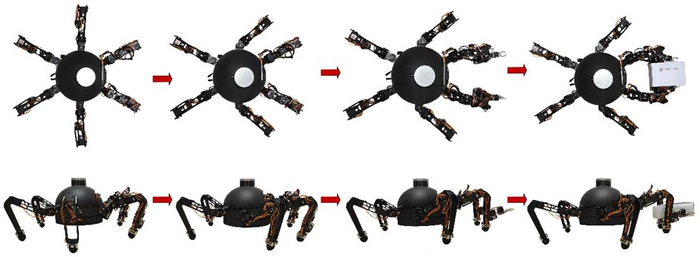
팀은 조작 중움직임은 효율성을 높이고 시간을 벌 수 있는 좋은 방법입니다. 새로운 로봇은 ALLOMAN 헥사포드라고 불렸습니다. 다리와 팔이 통합되어 로봇이 물체를 움직일 수 있게 조작할 수 있습니다.
지금까지 ALLOMAN 헥사포드는 실험적입니다.원기. 작업의 다음 단계에서 저자는 조작을 위한 더 많은 기능을 도입할 것입니다. 저자는 예를 들어 도시의 보안, 테러와의 전쟁 및 행성 탐사를 보장하기 위해 다기능 플랫폼이 필요한 영역에서 개발을 사용할 계획입니다.
더 읽어보기 :
그것은 수세기 동안 사냥되었습니다. 우리는 태양 옆에 행성 Vulcan에 대해 무엇을 압니까?
천문학자들은 지구 근처에서 행성을 발견했습니다: 그것은 매우 이상한 궤도를 가지고 있습니다
소립자 물리학에서 발견되는 설명할 수 없는 이중성: 그것이 무엇으로 이어질 것인가?