이탈리아 공과대학 연구진이 다리가 3개인 로봇 프로토타입을 선보였습니다.
MARM 로봇 플랫폼은 다음과 같이 구성됩니다.중앙 몸체, 세 개의 사지 및 특수 도킹 장치. 후자는 장치를 충전하고 데이터를 교환하는 데 사용됩니다. 로봇을 만들 때 과학자들은 중력이 있는 상태와 미세 중력이 있는 상태에서 작업할 수 있는 가능성을 제공했습니다.
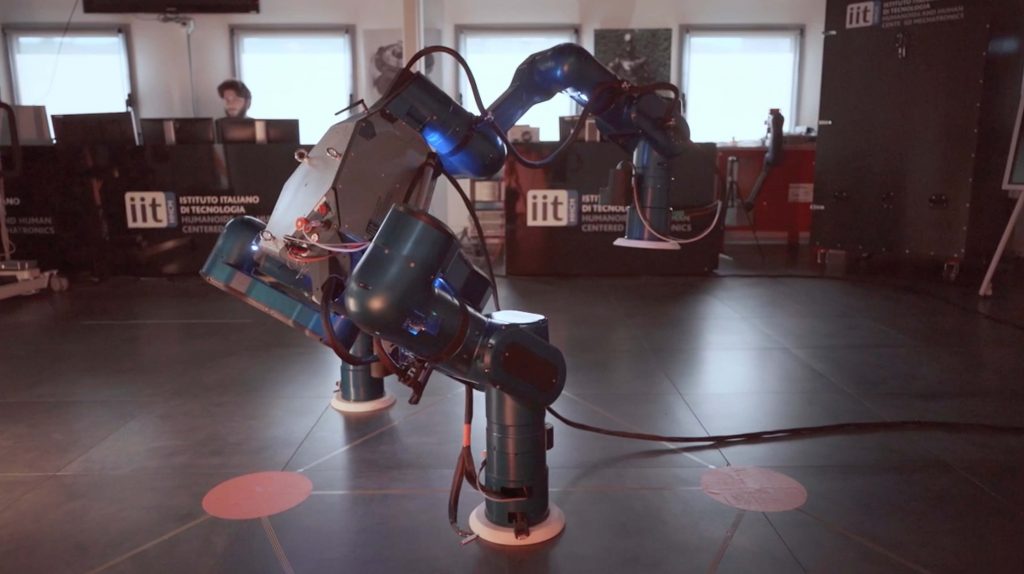
로봇 MARM. 비디오: IIT
MARM 로봇은 3개의 팔다리를 사용하여스테이션 표면의 표준 상호 연결을 잡고 그 위로 기어가 이동합니다. 또한 ISS에서 사용되는 폭 1.2m의 모듈식 육각판을 이동 및 설치하고 궤도 플러그인을 조작하는 등 다양한 장치 구성 요소를 조립하고 배치할 수 있습니다.

로봇 MARM. 사진: IIT
3개 림 구성 - 기본새로운 로봇과 이전 개발의 차이점. 엔지니어에 따르면 이것은 장치 작동에 더 큰 유연성을 제공합니다. 예를 들어, 그는 두 개의 "손"을 사용하여 나머지 하나의 도움으로 표면을 잡고 작업할 수 있습니다.
연구원들은 MARM을 사용하여 다음을 수행할 것을 제안합니다.창고에서 상품을 픽업하고 올바른 장소로 옮기고 수집하고 배치하십시오. 프로토타입은 이 시나리오를 염두에 두고 미세중력 상태에서 테스트를 거친 후 ISS로 보낼 작업 버전을 생성합니다.
더 읽어보기 :
영구 동토층의 과학자들: 그들이 스마트 의류와 암 백신을 개발하는 방법
지구에서 멀지 않은 곳에서 두 개의 행성이 발견되었습니다. 아마도 그들은 거주하고 있습니다
과학자들은 공룡의 죽음으로 누가 이익을 얻었는지 알아냈습니다