연구자들은 습기에 반응하는 미끄러운 표면을 개발했습니다. 시범 과학자를 위한
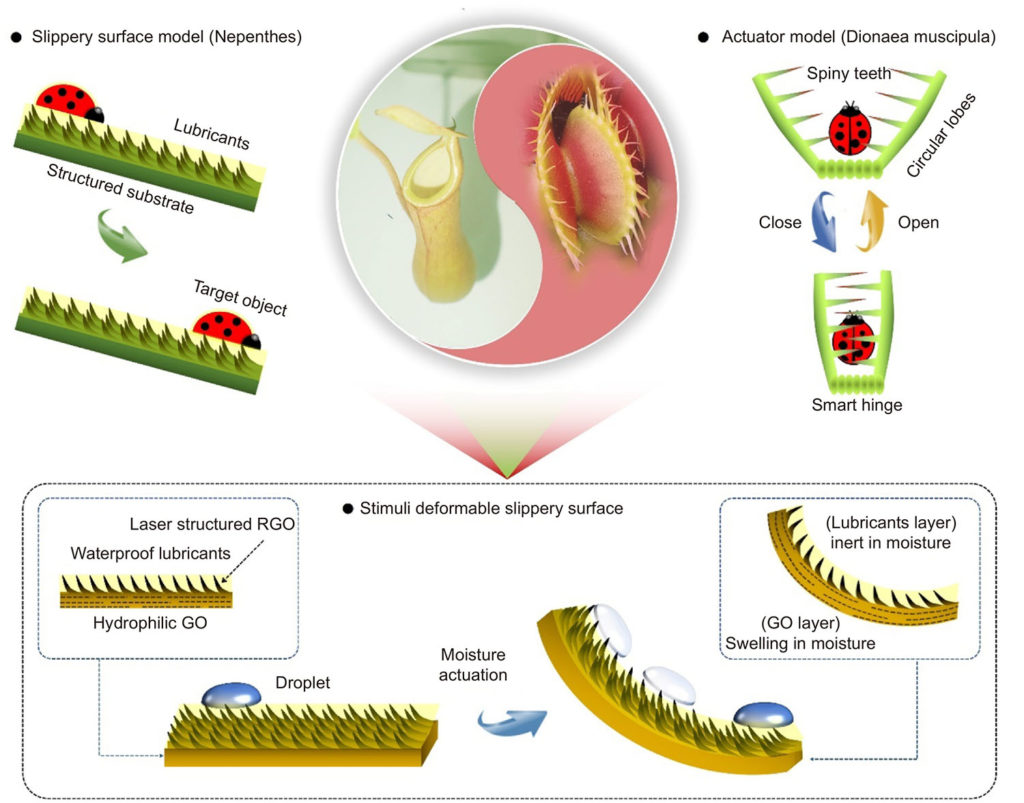
육식성 식물은 잡아서 소화할 수 있습니다.표면의 독특한 습윤성으로 인한 복잡한 메커니즘을 통해 작은 곤충. 이 기능은 결빙 방지 표면, 오염 방지 및 물방울의 응결 및 조작을 위한 장치와 같은 많은 장치의 개발에 영감을 주었습니다.
 야생 동물의 능동적 및 수동적 전략과 기계적 드라이브에서의 구현. 이미지: Han et al., Opto-Electronic Advances
야생 동물의 능동적 및 수동적 전략과 기계적 드라이브에서의 구현. 이미지: Han et al., Opto-Electronic Advances
새로운 연구에서 과학자들은 육식 식물의 두 가지 전략을 한 번에 결합했습니다: 능동 및 수동. 첫 번째는 자극에 대한 반응을 제공하고 두 번째는 먹이를 잡는 미끄러운 표면을 제공합니다.
과학자들은 직접 광복구를 사용했습니다.펨토초 레이저를 사용하여 수분 하에서 동적 변형을 가능하게 하는 이중층 GO 및 LRGO 액츄에이터를 생성하기 위한 동시 구조화. 윤활된 미끄러운 표면은 특수 윤활제와 모세관력을 사용하여 그래핀 작동기와 통합되었습니다.
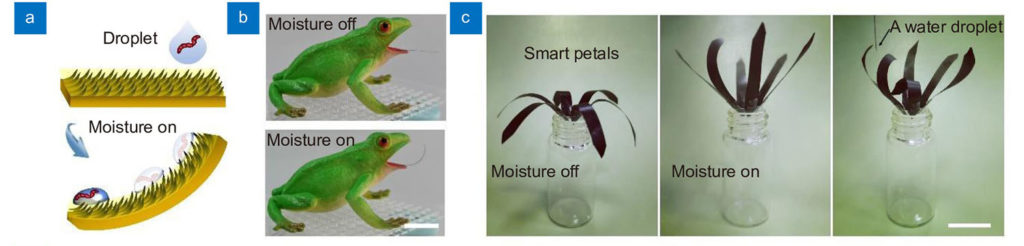 능동 및 수동 표면 작업 (a),유연한 개구리 혀(b)와 인공 액적 트래핑 플랜트(c)를 사용한 액적 트래핑. 이미지: Han et al., Opto-Electronic Advances
능동 및 수동 표면 작업 (a),유연한 개구리 혀(b)와 인공 액적 트래핑 플랜트(c)를 사용한 액적 트래핑. 이미지: Han et al., Opto-Electronic Advances
프로토타입 연구에 따르면감지 표면은 두 가지 방식으로 수분 방울 및 살아있는 유기체와 상호 작용할 수 있으므로 수동으로 활주하거나 드라이브에 능동적으로 참여할 수 있습니다. 개발자들은 이 신기술을 생체 공학 로봇 및 스마트 조직에서 강수량을 수집하고 결정하는 데 적용할 수 있다고 믿습니다.
더 읽어보기 :
우주선은 화물을 ISS에 배달하고 일반 "공항"에 착륙합니다.
별은 블랙홀에 접근했고 그것은 찢겨졌습니다: 과학자들은 이것을 3개의 망원경으로 관찰했습니다
과학자들은 우주에 있었던 모든 사람의 혈액에서 유전적 돌연변이의 흔적을 발견했습니다.