엔지니어 그룹이 팔다리를 7자유도로 움직일 수 있는 로봇을 공개했습니다.
대형 유지 보수 및 조립장치는 조건이 극단적이고 인간 기술의 수명이 짧은 우주에서보다 더 필요한 곳이 없다고 과학자들은 설명합니다. 25미터 거울로 투사된 LAST와 같은 거대한 망원경을 궤도로 발사하는 것은 기존 로켓으로는 불가능합니다.
이러한 장치를 궤도에서 직접 조립하는 것이 훨씬 쉽고 저렴합니다. 연구자들이 표면을 가로질러 이동할 수 있고 7개 방향으로 다양한 움직임을 수행할 수 있는 장치를 제안했습니다.
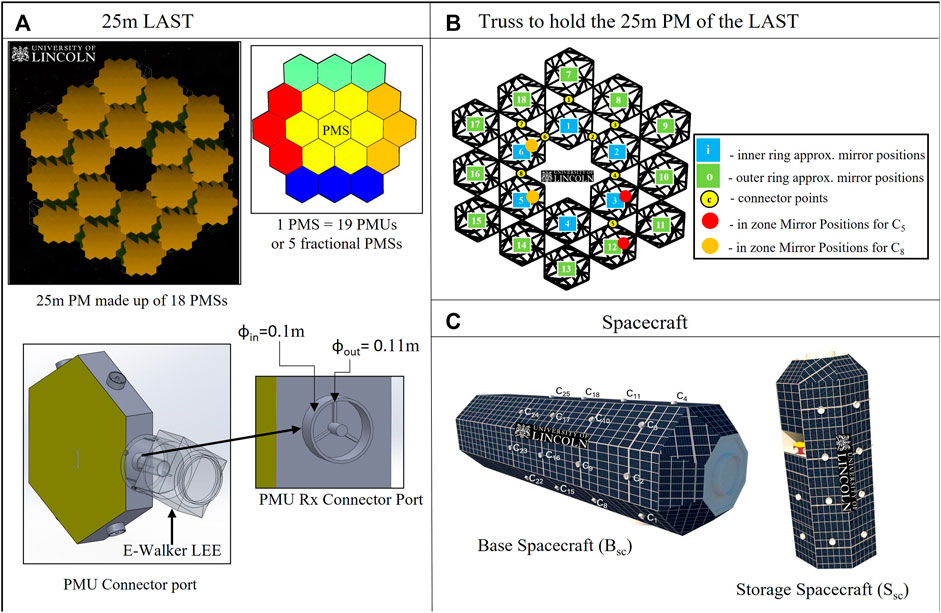 투영된 망원경의 계획과 로봇의 설계. 이미지: Manu Harikrishnan Nair et al., Frontiers in Robotics and AI
투영된 망원경의 계획과 로봇의 설계. 이미지: Manu Harikrishnan Nair et al., Frontiers in Robotics and AI
과학자들은 광범위한 엔지니어링을 수행했습니다.E-Walker가 궤도에서 LAST를 조립할 수 있는지 테스트하고 이를 기존 장치인 Canadarm2 및 ISS에 설치된 유럽 로봇 팔과 비교할 수 있도록 설계했습니다. 또한 엔지니어들은 지구에서 작업을 수행하기 위해 더 작은 프로토타입을 조립했습니다.
연구는 우월성을 확인했습니다현대 시설에 대한 설계 및 지구에서 발전소 터빈과 같은 복잡한 장치를 유지 관리하기 위해 더 작은 사본을 사용할 수 있는 능력.
우리의 분석은 제안된E-Walker의 혁신적인 설계는 다재다능하고 미래의 궤도 임무에 이상적인 후보임이 입증되었습니다. 로봇은 우주에서 예정된 유지 보수 및 조립을 수행하여 임무의 수명 주기를 연장할 수 있습니다.
링컨 대학의 연구원이자 이 논문의 공동 저자인 Manu Nair
더 읽어보기 :
블랙홀 삼킨 지 3년 만에 찢어진 별 '뱉어'
태양계 가장자리에서 발견된 특이한 구조물. 보이저만이 거기에 있었다.
살아있는 유기체는 화성을 사람이 살 수 없도록 만들었습니다.