페이스북은 이미 컴퓨터 비전과 자연어 처리 시스템을 사용할 예정이다.
로봇은 완전히 자율적으로 계획되어 있습니다.자가 학습 - 시스템은 원시 데이터에서 직접 학습해야합니다. 이를 통해이 디바이스는 새로운 도전과 상황 변화에보다 빠르게 적응할 수 있다고 믿습니다. 인공 지능의 기초는 로봇이 시행 착오를 통해 독립적으로 학습 할 수있게하는 RL 모델을 기반으로 학습하게 될 것입니다.
우리는 로봇이 도움없이 걷도록 가르치고 싶습니다. 움직임은 로봇 공학에서 매우 어려운 작업이며, 이는 우리의 입장에서 보면 매우 흥미로운 일입니다.
페이스 북 연구 개발자 Roberto Calandra
페이스 북에서 로봇의 독특한 특징장치가 이동을위한 알고리즘을 구현하지 않는다는 것입니다. 처음에, 그는 학습 알고리즘을 사용하면서 점차적으로 걸을 수 없으며, 이미 움직이기 위해 활성화 된 컨트롤러와 상호 작용하기 시작합니다. 로봇이 더 많은 경험을할수록 더 잘 작동합니다.

이 경우, 로봇은우주에서의 위치와 방향을 결정할뿐만 아니라 균형을 유지하고 무릎과 같은 복잡한 메커니즘의 올바른 작동을 위해 센서의 충격을 서로 연결하십시오.
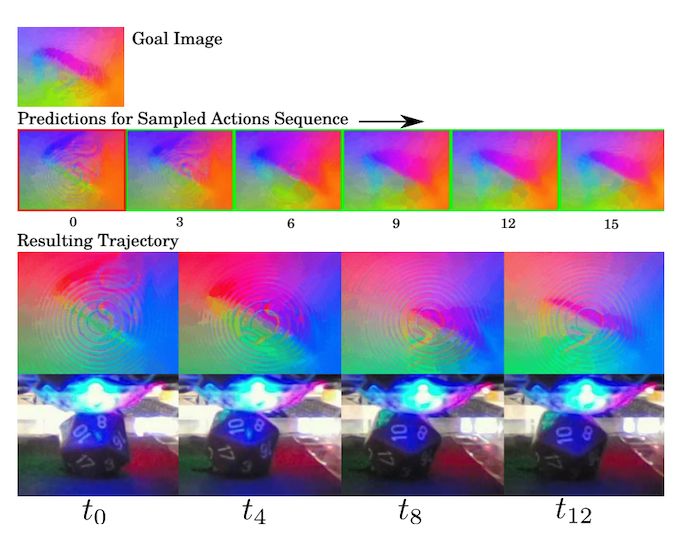
컴퓨터 비전을 위한 Facebook의 로봇동영상의 인기도를 예측하기 위해 개발된 알고리즘 중 하나를 사용하세요. 신경망은 엄청난 양의 자료 분석 속도를 높이기 위해 보지 않고도 몇 초 동안의 비디오를 분석하고 추가 프레임을 예측할 수 있습니다.
Facebook Research 실험의 일환으로조이스틱으로 작업하고, 20 개의면으로 큐브를 굴려 1 초 또는 몇 초 내에 결과를 올바르게 이해할 수있는 조작 장치를 최초로 도입했습니다.
시각 및 촉각 정보 소스를 결합하면 학습 방법 및 향후자가 학습 플랫폼의 기능을 향상시킬 수 있습니다.
개발자에 따르면 이제 비슷합니다.프로젝트에서는 한 가지 유형(최대 2개)의 정보만 사용하는 반면, 로봇 장치가 완전히 작동하려면 서로 다른 감각을 통해 정보를 인식해야 합니다.