로봇 공학자에게 제공되는 훈련 방법을 통해 로봇은 수영을 수행하는 방법을 자율적으로 배울 수 있습니다
"우리 연구에서 우리는 수중 로봇의 움직임을 시뮬레이션하기 위해 강화 학습을 제어하는 생물학적 방법을 제시했습니다."라고 개발의 저자 중 한 명인 Gang Chen은 말했습니다."이 방법은 이전 작업 중 하나를 기반으로 합니다Springer Link의 Journal of Intelligent & Robotic Systems에 발표된 비버 움직임 연구."
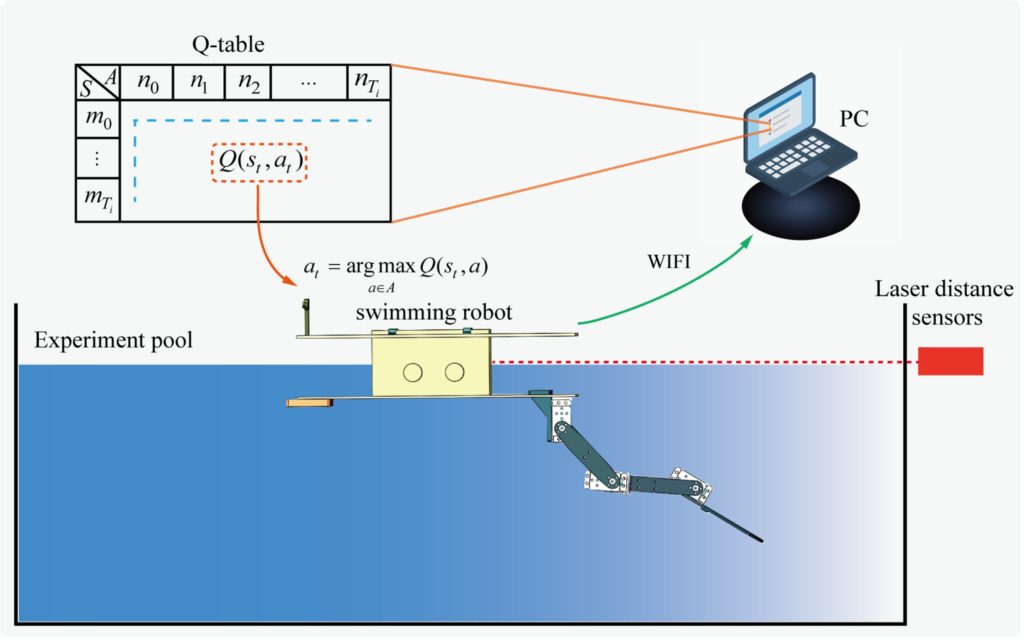 비버 로봇의 훈련 원리
비버 로봇의 훈련 원리
Chen과 그의 동료가 만든 것과 같은 수중 로봇동료들은 비선형 시스템이고 그들의 동작은 복잡한 유체 역학을 포함합니다. 따라서 모션을 정확하게 모델링하는 것은 상당한 계산 리소스를 필요로 하는 매우 복잡한 작업이 될 수 있습니다.
다른 잠수함 제어 모델과 달리Chen과 동료들이 개발한 로봇 접근 방식은 유체 역학을 기반으로 하는 복잡한 모션 모델의 통합이 필요하지 않습니다. 이것은 비버에서 수영을 담당하는 관절의 작업에 대한 아이디어의 단순화를 기반으로하기 때문입니다. 이렇게 하면 모델을 더 쉽게 훈련할 수 있고 훈련 중 로봇의 비효율적인 움직임도 줄일 수 있습니다.
"강화 학습을 결합하여비버의 수영 행동의 기초가 되는 메커니즘을 통해 우리의 방법은 수영에 대한 로봇 제어를 가능한 한 빠르고 효율적으로 구현합니다.”라고 Chen이 설명했습니다. "가장 주목할만한 이점은 복잡한 모션 제어 모델을 생성하지 않고 비버와 같은 외다리 로봇의 수영 제어를 신속하게 구현한다는 것입니다."
더 읽어보기
미국 위성은 지구에서 이상한 메시지를 "봤다"
실험용 가속기에서 발사된 로켓의 영상 공개
우리 은하의 중심에 있는 괴물: 우리 은하의 블랙홀 사진을 보세요