 독일 전문가들은 휴머노이드 로봇 LOLA에게 걸을 때 손으로 벽에 달라붙는 법을 가르쳤습니다.
독일 전문가들은 휴머노이드 로봇 LOLA에게 걸을 때 손으로 벽에 달라붙는 법을 가르쳤습니다.
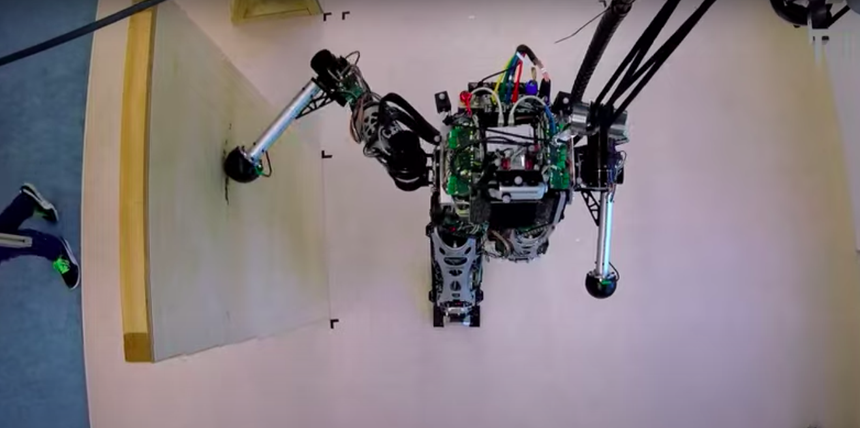
LOLA와 같은 로봇에서는 걸을 때 손을 사용하는 것이 일반적이지 않습니다. 그의 머리에는 26 개의 활성 관절과 카메라가있어 주변 공간의 체적지도를 만들 수 있습니다.
로봇은 또한 알고리즘을 사용합니다.손의 움직임을 계산합니다. 이 장치는지도를 만들고 바닥, 벽 및 개별 개체와 같은 영역을 표시 할 수 있습니다. 로봇이 걷는 방법은 아래 비디오에서 볼 수 있습니다. 영상에서 그는 발 아래에 접시가 미끄러 져 균형을 잃었지만 저항하며 벽을 잡았다.