스위스 이디아프 연구소(Idiap Research Institute), 홍콩중문대학교(CUHK) 연구진
“최근 우리 작업은 공동작업이다.세 개의 실험실. 우리는 이 기술을 약 10년 동안 연구해 왔으며 사람들을 위해 음식을 요리할 수 있는 지능형 로봇을 만드는 데 관심이 있습니다.
그들은 중국어에 집중하기로 결정했습니다.요리 기술, 특히 튀김, 재료를 지속적으로 저어줘야 하는 고온에서 재료를 튀기는 기술. 과학자들은 "이러한 로봇이 최근 몇 년 동안 이미 개발되었음에도 불구하고 반구조 주방 환경에서 로봇 요리사를 만드는 것은 여전히 어려운 작업"이라고 지적합니다.
그들은 새로운 메커니즘이Coordination은 양손의 움직임 사이에 순서를 전달하는 문제로, 이를 위해 Transformer와 GNN의 결합 모델을 사용한다. 따라서 인터랙티브 프로세스에서는 시각적 피드백에 따라 왼손의 움직임을 수정하고 왼손의 움직임을 기반으로 사전 훈련된 구조 변환기 모델에 의해 오른손의 해당 움직임이 생성됩니다.
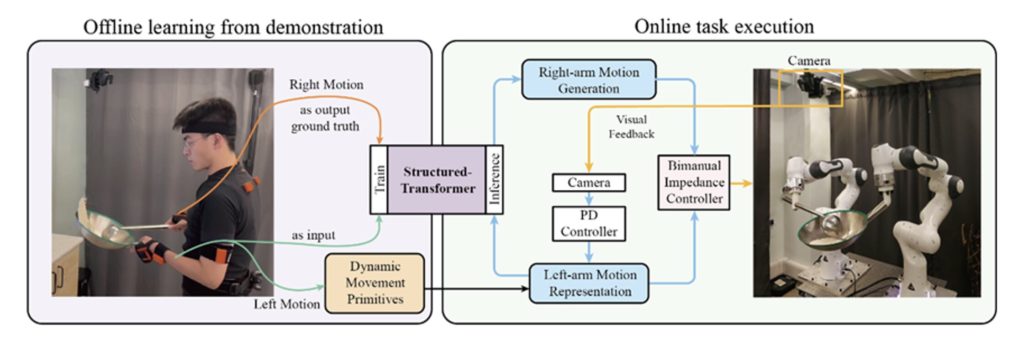
연구원들은 모델의 성능을 다음과 같이 평가했습니다.시뮬레이션 및 물리적 양손 로봇 플랫폼에서 수행됩니다. 이 테스트에서 모델은 로봇이 튀긴 감자 요리와 관련된 동작을 성공적이고 사실적으로 재현할 수 있도록 했습니다.
앞으로 그룹이 제시하는 모델은연구원들은 가정과 공공 장소 모두에서 요리할 수 있는 로봇의 개발을 허용할 수 있습니다. 또한 두 팔과 손을 사용하는 다른 작업을 위해 로봇을 훈련하는 데 동일한 접근 방식을 사용할 수 있습니다.
“이제 우리는 더 높은 차원의과학자들은 주방에서 일할 때 인간형의 움직임을 연구하기 위한 정보(예: 시각 신호 및 근전도 신호)를 언급합니다. "따라서 우리는 또한 양손 조작기의 움직임과 물체의 상태 변화를 모두 포함하는 더 복잡한 시스템을 제공할 계획입니다."
더 읽어보기
양자 시뮬레이터는 1차원 공간에서 전자를 여러 부분으로 나누는 것을 보여줍니다.
물리학자들은 영원히 작동할 수 있는 원자 레이저를 만들었습니다.
지구에서 멀지 않은 곳에 우리와 매우 유사한 두 개의 행성이 발견되었습니다.